شرکت آشیانه ققنوس ایرانیان | علیرضا نوروزی | آموزش ساخت پهپاد | پهپاد
آموزش، طراحی، ساخت، تعمیر و پشتیبانی انواع پرنده های بدون سرنشین (غیرنظامی) www.phoenix-air.irشرکت آشیانه ققنوس ایرانیان | علیرضا نوروزی | آموزش ساخت پهپاد | پهپاد
آموزش، طراحی، ساخت، تعمیر و پشتیبانی انواع پرنده های بدون سرنشین (غیرنظامی) www.phoenix-air.irابر برچسب
#کوادکوپتر #آموزش #هلی_شات #پهپاد #هواپیمای بدون سرنشین #موشک #پرواز_کوادکوپتر #مولتی_روتور #هوافضا #خانواده_فونیکس #هوش_هوافضا #فونیکس #علیرضا_نوروزی #فونیکس_رویاهات_باش #آشیانه_ققنوس_ایرانیانجدیدترین یادداشتها
همه- رتبه های قبولی کنکور در رشته هوافضا
- معرفی رشته هوافضا ،توانایی ها، بازار کار، درآمد و حقوق
- هواپیمای کنترلی ( هواپیمای RC) برای مبتدیان-قسمت 4
- هواپیمای کنترلی ( هواپیمای RC) برای مبتدیان-قسمت 3
- هواپیمای کنترلی ( هواپیمای RC) برای مبتدیان-قسمت2
- هواپیمای کنترلی ( هواپیمای RC) برای مبتدیان-قسمت 1
- راز فلایت کنترل روی هواپیما ها و پهپاد ها
- آموزش ساخت هواپیمای مدل به وسیله چوب بالسا
- پیدا کردن راحت کوادکوپتر گمشده خود بعد از کرش-2020
- معرفی جذاب انواع فریم های کواد کوپتر( قسمت دوم)
بایگانی
- مهر 1399 8
- شهریور 1399 17
- مرداد 1399 19
- تیر 1399 18
- خرداد 1399 17
- اردیبهشت 1399 22
- فروردین 1399 13
جستجو
اجزای پهپاد
امروزه بحث در خصوص پهپادها و حوزه کارایی آنها در بخش فناوری، مبحثی داغ و همواره جذاب است. به گونه ای که برخی شرکتها همچنان درصدد هستند تا با کار بر روی سیستم کنترل این ابزار تکنولوژی و بهبود سیستم ناوبری آن، ایده های جدیدی را مطرح سازند.
اگر تنها کمی در مورد پهپادها اطلاعات داشته باشید متوجه می شوید که این ابزارهای مفید در بخش های گوناگونی از زندگی بشر کاربرد داشته و قادر به رفع نیاز او می باشند.
واژه “پهپاد” مخفف “پرنده هدایت پذیر از دور” است که برای هواپیماهای بدون سرنشین تعریف شده و از حروف اول کلمات مذکور ساخته شده است. به عبارت دیگر پهپاد وسیله ای هوایی و بدون سرنشین است که امکان هدایت آن از راه دور وجود دارد. بدین ترتیب کنترل پهپاد بدون نیاز به حضور فیزیکی انسان در وسیله پرنده صورت می پذیرد با این حال انسان می تواند به عنوان محموله در پهپاد حضور داشته باشد.
تاریخچه استفاده از پهپاد به سال ۱۸۴۹ باز می گردد؛ در آن زمان اتریش، بالن پر از بمب بدون سرنشینی را برای حمله به ونیز فرستاد و نام خود را به عنوان نخستین بهره گیرنده از پرنده های بدون سرنشین در تاریخ به ثبت رساند. با این حال نوآوری در زمینه ساخت هواپیماهای بدون سرنشین یا همان پهپادها به طور جدی از سال ۱۹۰۰ آغاز شد که هدف آن در اصل آموزش پرسنل نظامی بود. بدین ترتیب تولید نخستین پهپادها در طول جنگ جهانی اول و توسط شرکت دیتون رایت آغاز گردید که البته موفقیتی در پی نداشت.
در سال ۱۹۵۹، نیروی هوایی ایالات متحده در پی افزایش نگرانی های این سازمان در خصوص از دست دادن خلبانان خود در خاک دشمن، شروع به برنامه ریزی برای استفاده از هواپیماهای بدون سرنشین کرد. این روند تا آگوست ۱۹۶۴ نیز ادامه یافت به گونه ای که با افزایش درگیری نیروی دریایی ایالات متحده و نیروی دریایی ویتنام در خلیج تونکین، آمریکا تصمیم به ارسال پهپادهای خود به این خلیج گرفت. بدین ترتیب پهپادهای مدل رایان ۱۴۷، رایان AQM-91 فایرفلای، لاکهید دی-۲۱ اولین پهپادهای نظامی بودند که در جنگ ویتنام
به کار گرفته شدند.
جنگ فرسایشی ۱۹۶۷ تا ۱۹۷۰ در خاورمیانه، برجسته ترین نبرد در معرفی پهپادهای مجهز به دوربین های شناسایی است. جالب است بدانید از سال ۲۰۱۲، نیروی هوایی ایالات متحده ۷۴۹۴ پهپاد را برای شناسایی تجهیزات نظامی سایر کشورها به کار گرفته است. این تعداد تقریباً برابر با یک سوم هواپیماهای نیروی هوایی ایالات متحده می باشد.
طبق آمار در سال ۲۰۱۳ حداقل ۵۰ کشور از پهپاد استفاده می کردند. چین، ایران، اسرائیل و سایرین از جمله اصلی ترین طراحان و سازندگان پهپادها می باشند.
- اجزای پهپاد ها:
- شهپر:
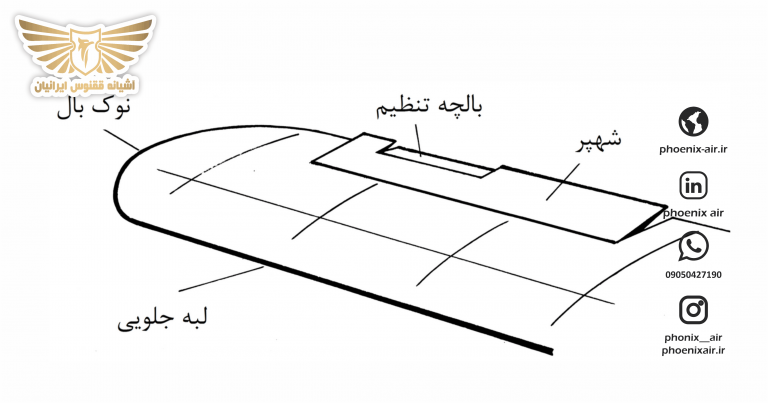
شَهپَر یا همان (Aileron) قسمتی از نوک بال است .حرکت شهپرها منجر به حرکت هواپیماها به چپ یا به راست، در آسمان می شود. این حرکت در دو شهپر، در خلاف جهت هم رخ می دهد به اینگونه که اگر شهپر بال راست به سمت بالا حرکت کند؛ شهپر بال چپ به طور همزمان پائین می آید.
Rudder :
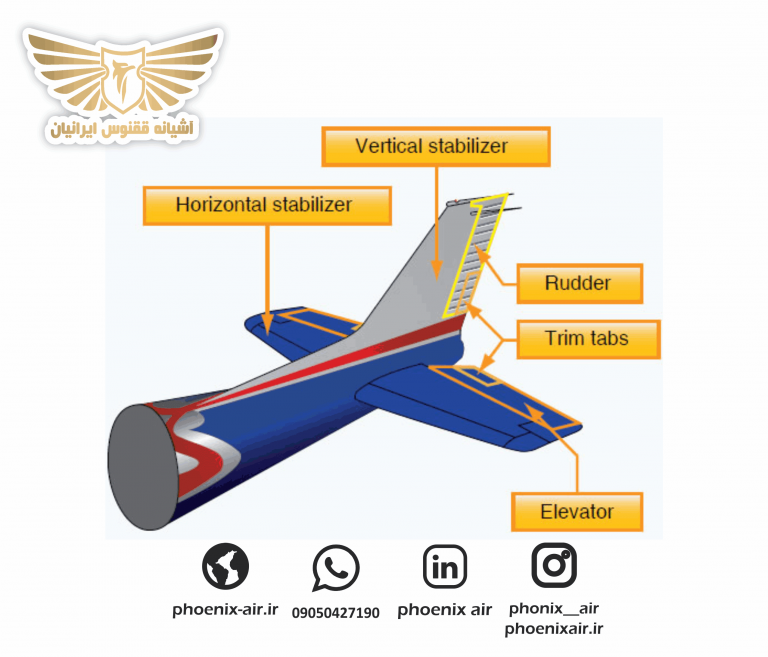
به قسمت متحرک پایدار کننده عمودی (vertical stabilizer) رادر (Rudder) میگویند و در واقع چرخش حول محور عمودی هواپیما و انحراف از مسیر توسط آن انجام می شود که همان Yaw می باشد و خلبان توسط پدال هایی که زیر پایش قرار دارد Rudder را حرکت می دهد.
حرکت Rudder و تاثیر آن رو هوپیما
به این صورت است که با حرکت رادر به سمت چپ هوایی که از سمت چپ پایدار
کننده عمودی به رادر برخورد می کند، آن را فشرده می کند و به آن اعمال نیرو
می کند و باعث می شود که قسمت دم هواپیما به سمت راست حرکت کند و این کوپل یا گشتاور ایجاد شده حول محور عمودی باعث چرخش نوک هواپیما به سمت چپ می گردد.
به طور خلاصه حرکت Rudder به سمت چپ باعث دور زدن هواپیما به سمت چپ می شود و حرکت Rudder به سمت راست باعث دور زدن هواپیما به سمت راست می شود. و در اصل رادر کمک میکند هواپیما بدون تغییر ارتفاع به چپ و راست حرکت کند.
رادر در قسمت انتهایی پایدار کننده عمودی ( Vertical Stabilizer ) متصل شده است. Rudder توسط 2 پدالی که زیر پایین خلبان وجود دارند کنترل می شود. این قسمت بر خلاف Vertical Stabilizer ثابت نیست و متحرک می باشد. لازم به ذکر است که Rudder به خلبان این امکان را می دهد که دماغه هواپیما را در زمان پرواز به سمت چپ و یا راست متمایل نماید. همچنین در هنگام دور زدن هواپیما، از Rudder و Aileron ها به صورت ترکیبی استفاده می شود تا هواپیما بتواند یک دور بدون مشکل را تجربه کند.
فلپ ها :
فلپ ها قطعات و قسمت های اضافی در بال و ایرفویل هواپیما هستند که با افزایش سطح موثر بال و تغییر انحنای بال باعث ایجاد نیروی برآ بیشتر در سرعت های پایین هستند از این رو هواپیما ها می توانند با استفاده از این قطعه و در سرعت کمتر از سرعت مورد نیاز به راحتی تیک اف کرده و یا فرود بیایند.
-
سه مورد از مزایای استفاده از انواع فلپ ها به صورت کلی عبارتند از :
- کاهش سرعت مورد نیاز برای تیک اف و لندینگ
- افزایش نیروی پسا (Drag ) و در نتیجه کاهش سریع سرعت هواپیما برای فرود
- کاهش طول باند مورد نیاز برای تیک اف و لندینگ
این قطعات معمولا در انتهای بال ( ایرفویل ) هواپیما ها که اصطلاحا به آن leading edge یا لبه فرار نیز گفته می شود قرار می گیرد. فلپ ها در شکل ها و کاربرد های مختلف مورد استفاده قرار می گیرند که در ادامه به معرفی چند نمونه از انواع آن ها می پردازیم.
انواع فلپ
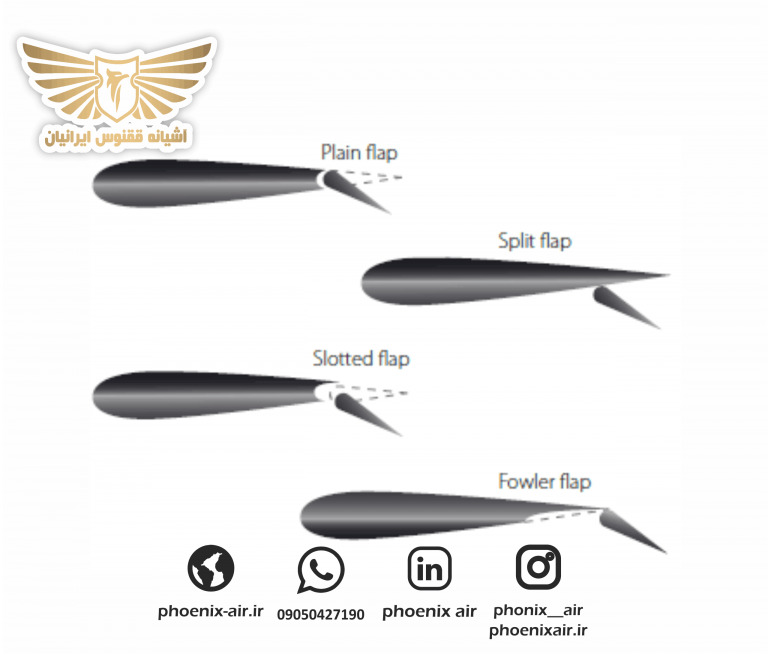
Plain Flaps
این فلپ در واقع ساده ترین نوع فلپ مورد استفاده در هواپیما ها محسوب می شود. این فلپ با توجه به محدودیت حرکتی که دارد توانایی تولید نیرو برای اضافی زیادی را ندارد و از طرف دیگر باعث ایجاد توربولانس و نیروی درگ زیادی در بال شده که البته این نیروی درگ می تواند به شما برای کاهش سرعت در لندینگ ها کمک فراوانی کند.
Split Flaps
فلپ هایی هستند که از زیر ایرفویل و بال هواپیما ها خارج می شوند و نصبت به فلپ های Plain توانایی تولید نیروی برای بیشتر را دارند اما از این فلپ ها امروزه استفاده چندانی نمی شود و مانند فلپ های plain به دلیل ساختاری که دارند نیروی پسا و درگ بسیار زیادی را در هواپیما ایجاد می کنند.
Slotted Flap
این فلپ ها جزو پرکاربرد ترین و مرسوم ترین فلپ های مورد استفاده در هواپیماهی کوچک و بزرگ امروزی هستند. دلیل این محبوبیت را می توان در دو ویژگی این فلپ ها یافت.
تغییر در انحنای بال هواپیما و تولید نیرو برای بیشتر
ایجاد شکافی بین لبه فرار بال و خود فلپ
ایجاد این شکاف بین لبه فرار و لبه حمله فلپ باعث حرکت هوای پر فشار از زیر بال به روی بال و تولید نیروی برای بیشتر درعین کاهش تولید نیرو پسا و درگ می باشد که باعث بالا رفتن کارایی و بازدهی بال می شود.
Fowler Flap
برتری این فلپ ها نسب به سایرین را می توان ایجاد نیروی برآ بسیار شگفت انگیز برای هواپیما های سنگین دانست چراکه با استفاده از این فلپ علاوه بر تغییر در منحنی بال سطح مقطع موثر بال را نیز افزایش می دهد و به دلیل ایجاد شکاف هایی بین بال و فلپ مانند فلپ Slotted نیروی پسای کمتری را نیز تولید می کند.
بال:
یکی از کاربردی ترین و حساس ترین قسمت های پرنده های بدون سرنشین، بال آن است و از آنجایی که تمام نیروی لازم برای بالا کشیدن توسط آن ایجاد می شود طراحی و ساخت این قسمت، دقت و ظرافت بالایی را می طلبد.
بالها موجب افزایش نیروی بالا برنده (Lift) و گردش هوا در اطراف پهپاد می شوند و محاسبات گسترده ای را جهت طراحی سطح مقطع بال (air foil)، طول بال (wing span)، زاویه نصب بال (angle of incidence)، مکان نصب بال به بدنه ، زاویه بین بال سمت چپ و بال سمت راست و… می طلبند. زیرا که تنها یک اشتباه محاسباتی کوچک در طراحی آنها می تواند موجب انحراف پهپاد در حین پرواز و یا حتی سقوط آن شود
- ارابه فرود :

ارابه فرود یکی از قسمت های مهم هر نوع هواپیما می باشد که وظیفه جذب انرژی ناشی از فرود هواپیما را بر عهده دارد. در مراحل طراحی هواپیما، معمولاً پس از طراحی بدنه و بال هواپیما، طراحی ارابه فرود انجام میشود. در واقع طراحی ارابه فرود به طراحی بدنه و چیدمان اجزاء هواپیما و محل مرکز ثقل هواپیما وابسته است.
ارابه فرود وزن کلی پرنده را تحمل کرده و آن را در حالت پایدار نگه میدارد و همینطور ضربات را جذب و خنثی میکند.
انواع پهپاد
به طور کلی پهپادها را می توان به پنج دسته اصلی تقسیم بندی نمود.
در حقیقت میکرو پهپادها یک مدل کوچکتر از هواپیماهای بزرگ نیستند. بلکه آنها وسایلی مناسب، کاملاً عملیاتی، دارای قابلیت نظامی و دارای پروازهای
کوچک در کلاس مربوط به خودشان هستند. تعریفی که در دارپا به کار گرفته شده
است این وسیله را از نظر ابعاد محدود می کند به اینکه حداکثر 15 سانتی متر
طول یا عرض یا ارتفاع داشته باشد. این ابعاد فیزیکی، این گروه از وسایل را
از نظر بزرگی در حیطه ای قرار می دهد که از همه پهپادهایی که تا به حال
ساخته شده است، کوچکترند.
از سوی دیگر میکرو پهپادها به عنوان رباتهای هوایی شش
درجه آزادی در نظر گرفته می شوند که قابلیت حمل بارهای کوچک را، به مناطق
دور و یا پر خطر برای انجام ماموریت های مختلف دارا می باشند. این ماموریت
ها می تواند شامل شناسایی، تعقیب، هدف یابی، کنترل جاده ها و مرزها، کنترل
ترافیک شهری، نشانه گذاری، و حسگری زیست محیطی باشد.

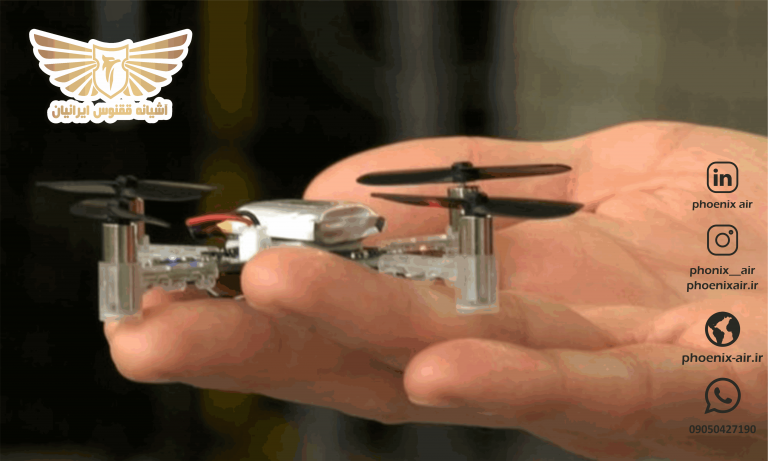
مینی پهپادها دارای محدوده عملیاتی کمتر از 8 هزار فوت بوده و با برخورداری از سه دوربین نصب شده بر روی آنها این توانایی را دارند که از موقعیت دشمن فیلمبرداری کرده و بلافاصله به اپراتورهای خود ارسال نمایند.
این پهپادها به طور معمول اندکی از کف دست انسان کوچکتر هستند و وزنی معادل 18 گرم دارند. همچنین این ابزارها کاملاً بی صدا بوده و اگر بالای سر شما پرواز کنند شما قادر به تشخیص آن نیستید. گفتنی است یک مینی پهپاد تنها در سه دقیقه راه اندازی می شود که این ویژگی در ماموریت های نظامی در میادین جنگی بسیار حائز اهمیت می باشد. شارژ پهپاد مذکور بر روی سقف آن نصب شده و با استفاده از آن می تواند حدود سه ساعت و نیم پرواز بی وقفه داشته باشد.
جالب است بدانید کاربردهای فراوانی برای این پهپاد وجود دارد. به طور مثال جزایری وجود دارد که انسان امکان حضور در آن را ندارد و یا در میدان جنگ برخی نقاط باید پیش از حضور نیروها شناسایی شود که در این صورت از این مینی پهپادها استفاده می گردد.

4.پهپاد هال



بدنه یک پهپاد باید به گونه ای طراحی گردد که بتواند سامانه های ارتباطی، جنگ افزارها، اشخاص، بارها و کلیه لوازم مرتبط با ماموریت محوله اش را در خود جای دهد و ویژگی سازگاری با شرایط جوی منطقه ماموریت را نیز دارا باشد.
یکی از بخش های مهم یک مولتی روتور یا پهپاد بدنه آن می باشد که در زبان خارجی به آن Frame یا فریم ایر (بدنه هواپیما) گفته می شود. هر پهپاد با توجه به تعداد روتورهای خود به یک فریم مخصوص نیاز دارد تا بتوانید تمامی قطعات ذکر شده را بر روی آن نصب کنید. به عنوان مثال بدنه ای که در تصویر بالا مشاهده می کنید مخصوص یک کوادکوپتر یا پهپاد ۴ موتوره می باشد که بر روی هر کدام از بازوهای آن یک روتور نصب میشود. از مهمترین ویژگی های یک فریم خوب باید تا حد امکان سبک بوده و علاوه بر این استحکام لازم برای تحمل وزن مولتی روتور را داشته باشد. شما باید با دقت بالا فلایت کنترل، موتورها و لوازم دیگر را بر روی این فریم نصب کنید.
- موتور پهپاد

پهپادها نیاز به نوع ویژهای از موتورها دارند. در نوع پیستونی دور بالای موتور و وزن کم، باعث متمایز کردن این موتور می شود. بیشترین مصرف موتور در پهپادها مربوط به موتور وانکل و نوع ویژه ای از موتوردو زمانه است.
برای ساخت پهپاد هنگام خرید موتور باید خیلی دقت کنید که آن موتور با قطعات دیگر نظیر فلایت کنترل و غیره سازگار می باشد یا خیر؛ به همین دلیل یک ابزار با نام eCalc وجود دارد که به صورت آنلاین تمامی محدودیت ها نظیر میزان سرعت، زمان پرواز و قابلیت حمل را در اختیار سازنده قرار می دهد. بنابراین قبل از شروع کار می توانید بگویید که این قطعات در کنار هم کار می کنند.
برای چینش موتورها باید به صورتی عمل کنید که دو موتور چپگرد یا راستگرد کنار هم قرار نگیرند. یعنی موتور جلو سمت چپ و عقب سمت راست جهت عقربه های ساعت می چرخند و موتورهای جلو سمت راست و عقب سمت چپ خلاف جهت عقربه های ساعت می چرخند تا بلکه بتوانند نیروی کششی همدیگر ار خنثی کنند و تعادلی مناسب برای پرنده به ارمغان بیاورند.
کنترل کننده سرعت الکترونیکی :
یکی دیگر از قطعاتی که نقش اساسی در کوادکوپتر دارد کنترلر الکترونیکی موتورها می باشند که هنگام پرواز سرعت و مقدار جریانی که به طور مداوم می تواند برای موتورها تامین کند را با واحد Amps کنترل می کند. این کنترل کننده های سرعت مولتی روتور با نظارت بر راندمان موتورها و گشتاور تولیدی آنها از بروز هرگونه آسیب برای موتورها جلوگیری می کنند. در واقع این این کنترلر های الکترونیکی پیوندی میان برد مرکزی و موتورها میباشند که با لحیم کاری به هم متصل می شوند.
ملخ ها یا پروانه :

ملخ ها یا در زبان لاتین (propellers) یکی دیگر از قطعاتی مورد نیاز برای ساخت پهپاد هستند که نقش اساسی برای ارائه یک پرواز کنترل شده را دارند. هنگام خرید ملخ کوادکوپتر توجه داشته باشید که مدل خریداری شده سازگار با موتور مورد نظر می باشد چرا که در دیتاشیب یا ورق مشخصات موتورها سایز و نوع پروانه های سازگار با آن ذکر می شود. برای افزایش کارایی این پروانه ها کاربر دو گزینه را پیش روی خود می بیند. اول می تواند از ملخ هایی با تیغه های بیشتر استفاده کند یا طول تیغه ها را افزایش دهد که در بسیاری از مواقع افزایش طول تیغه ها باعث به هم ریختن چارچوب مولتی روتور و بروز یک بی نظمی خاص میشود. بنابراین برای افزایش کارایی و گشتاور تولیدی می تونید از ملخ های سه پره استفاده کنید. برای نصب ملخ ها دقت کنید که به طور محکم در جایگاه خود نصب شده اند و هیچگونه خطری برای آنها وجود ندارد. برای افزایش ایمنی آنها و عدم آسیب به خلبان و سایر لوازم اطراف توصیه می شود از گاردهای محافظ ملخ استفاده کنید.
باتری پرواز :

باتری یکی از اجزای مورد نیاز دیگر برای ساخت کوادکوپتر می باشد و هنگام خرید باتری باید میزان مصرف تمامی موتورها و ال ای دی ها را محاسبه کنید تا بتوانید یک باتری با ولتاژ و جریان سازگار خریداری کنید. منبع تغذیه موتورها و تمامی قطعات الکتریکی یک پهپاد باتری های لیتیومی می باشند که قابلیت شارژ مجدد را دارند و چرخه عمر آنها بسیار بوده تا بتوانند بعد از یک بار شارژ زمان مناسبی پرنده را به صورت معلق یا در حال حرکت در آسمان حفظ کنند. باتری کوادکوپتر از یک یا چند سلول لیتیوم یونی ساخته می شود که با تولید ولتاژ مورد نیاز باعث حرکت پروانه ها و در نتیجه از زمین کندن هواپیما می شوند. برای افزایش مداومت پروازی باید از باتری های بیشتر یا باتری هایی با ظرفیت بالا در نظر بگیرید که با این حال باز هم باعث افزایش وزن تیکاف پرنده و در نتیجه این افزایش وزن تاثیر خود را بر روی مداومت زمانی پرواز خواهد گذاشت. هنگام خرید باتری پهپاد باید به ولتاژ ، جریان و سایر جزئیات آن توجه داشته باشید. از بست های مناسب برای محکم کردن باتری بر روی بدنه مولتی روتور استفاده کنید. برای شارژ باتری از شارژر مخصوص آن با ولتاژ و جریان مناسب استفاده کنید و همیشه نکات لازم برای شارژ و سلامت باتری را رعایت کنید.
فرستنده رادیوئی:

فرستنده یا ریموت کنترل در واقع مهمترین بخش یک سیستم کنترل پرنده می باشد که از طریق فرکانس های ۲٫۴ و ۵٫۸ گیگاهرتز دستورالعمل های لازم را انتقال می دهد. این کنترل از راه دور در واقع دستورات شما را بر روی گیرنده ای که در داخل کوادکوپتر نصب میکنید انتقال می دهد و در آنجا پس از پردازش فرمان شما پرنده تغیر مسیر پیدا میکند. استیک های جهت و سرعت دو اهرم اساسی بر روی ریموت می باشند که با کوچکترین اشاره به آنها شاهد تغیر موقعیت پرنده خواهید بود. یک فرستنده معمولی دارای ۴ کانال می باشد که از طریق آنها می توان چهار محور اساسی را کنترل کرد. اما استفاده از کانال های بیشتر می تواند کارایی یک فرستنده را افزایش دهد. البته این را بدانید که هر چه تعداد کانال های یک کنترل از راه دور بیشتر باشد بر قیمت آن می افزاید.
- گیرنده رادیوئی:

یکی دیگر از قطعات مورد نیاز برای ساخت پهپاد گیرنده رادیویی یا رسیور آن می باشد که در نقش مکمل کنترلر ظاهر می شود و تمامی دستورالعمل های ارسالی را پردازش و عملی می کند. شما هنگام انتخاب ریموت میتوانید همراه آن گیرنده را تهیه کنید اما برخی از گیرنده ها به صورت جداگانه عرضه می شوند. هنگام خرید به تعداد کانال ها توجه کنید. گیرنده SBUS یکی از بهترین ها می باشد که قابل سوئیچ بر روی نسخه PWM می باشد. هنگام پرواز صبر کنید تا سیستم فرستنده ارتباط خود را با گیرنده برقرار کند و ارتباط دقیقی برقرار کند. در تصویر پایین چند نسخه از رسیورهای رادیویی مخصوص کوادکوپتر را مشاهده میکنید.
شارژر باتری:
برای خرید شارژر باتری پهپاد توجه داشته باشید که یک شارژر با ورودی و خروجی سازگار با باتری تهیه کنید که هنگام شارژ از باتری در برابر ولتاژ های خطرناک محافظت کند. قبل از شروع پرواز باتری را به حالت فول شارژ تبدیل کنید تا هنگام پرواز مجبور به فرود غیرمنتظره نباشید.
رگولاتور ولتاژ:
دقیقا برای توصیف این قطعه می توان گفت یک دستگاه متعادل سازی برای تمامی قطعات الکتریکی نظیر فلایت کنترل، موتورها و کنترل کنند سرعت موتورها می باشد که از اتصال جریان های شدید جلوگیری می کند. این قطعه هم یکی از قطعات جانبی کوادکوپتر می باشد که همراه قطعات اصلی باید آن را خریداری کرد.
قطعات اختیاری برای ساخت پهپاد :
علاوه بر وسایلی که در بالا ذکر کرده ایم، چند مورد دیگر هم وجود دارد که کاربر با توجه به توقعات و توان خود می تواند آنها را خریداری کند. در واقع برای افزایش کارایی یک پهپاد شما می توانید قطعاتی دیگر را بر روی آن نصب کنید.
دوربین :

با نصب یک دوربین شما می توانید در واقع یک هلی شات بسازید. شاید این سوال برایتان پیش بیاید که هلیشات چیست؟ به پهپادی که دارای دوربین بوده یا قابلیت فیلم برداری و تصویر برداری را دارد هلی شات می گویند. اما هنگام خرید دوربین باید اول ببینید که کوادکوپتر شما توانایی حمل آن دوربین را دارد یا خیر. برای انتخاب دوربین سعی کنید که وزن مناسبی داشته باشد تا تاثیر منفی بر مداومت شارژی باتری نداشته باشد. کاربران همچنین برای مشاهده تصاویر و فیلم ها به صورت زنده می توانند دو قطعه گیرنده و فرستنده بی سیم را خریداری کنند که دارای فرکانس رادیویی ۵٫۸ گیگاهرتز می باشند.
گیمبال پهپاد :

زمانی به این قطعه نیاز دارید که قصد نصب دوربین بر روی پهپاد خود را داشته باشید. این لرزشگیر بین دوربین و کوادکوپتر نصب می شود مانند لرزشگیر اوزمو. تا هنگام پرواز تمامی لرزش های دوربین را خنثی کند و تصاویری شفاف به ثبت برساند.
محموله:
منظور از محموله های پهپاد در واقع قطعه اضافی است که همراه پرنده هدایتگر برای انجام ماموریتهای ویژه فرستاده می شود که در پهپادهای شناسایی، “دوربین فیلم برداری و عکس برداری”، در پهپادهای هدف، “فلر و رفلکتور” و در پهپادهای تهاجمی و انتحاری، “مهمات” می باشد.
برای ساخت پهپاد مطمئنا به تمامی قطعات آن و ابزارهایی برای نصب آنها نیاز پیدا می کنید که در نگاه اول انتخاب آنها تا حدودی دشوار می باشد بخصوص برای افرادی که از دنیای هواپیماهای بدون سرنشین اطلاعات کافی نداشته باشد. اما یک تجربه باعث می شود تا شما خیلی راحت تمامی این قطعات را تهیه کرده و به راحتی آنها را در کنار هم به کار ببرید.
گسترش پهپاد ها:
در حال حاضر ۳۲ کشور در حال ساخت و گسترش ۲۵۰ مدل پهپادهای اکتشافی هستند. فرانسه و آلمان سی ال 285 را گسترش دادند که در جنگ های بوسنی و کوزوو کاملاً موفقیت آمیز عمل کرد. روسیه با ساخت پهپاد تی یو 300 به فناوری بهتری دست یافته است و ایتالیا نیز میراچ 150 را ساخته است. این پهپادها مجهز به موتور جت می باشند و می توانند در ارتفاع بالایی پرواز کنند. ابابیل، مهاجر، سفره ماهی و آر کیو 170 نیز از پهپادهای ساخت ایران هستند.
کلام آخر:
ما مفتخریم اعلام کنیم که فعالیت های ما تنها محدود به کلاس های علمی و آموزشی نمی باشد .بلکه ما در فونیکس فرصتی را پدید آورده ایم که به کمک آن می توانید در وقت و هزینه خود صرفه جویی کنید و بازدهی را به طور چشمگیر افزایش دهید. زیرا در جامعه امروزی که نیاز ها تغییر کرده اند.
راه حل های قدیمی جوابگوی مشکلات جدید ما نیستند و ما قادر خواهیم بود. با دانش و تخصص خود بهترین راه حل را برای شما به ارمغان آوریم با ارائه ی فعالیتهای صنعتی شرکت فونیکس ساخت و تولید انواع پهپاد و هواپیمای بدون سرنشین خدمات پس از فروش تعمیرات ، آموزش پرسنل و … در خدمت شماست.
همچنین با طراحی دلخواه شما در زمینه های صنعتی و تفریحی به صورت اختصاصی (طراحی انواع هواپیما ،بالن و …)شما را همراهی می نمائیم.
#فونیکس_رویاهات_باش #آشیانه_ ققنوس_ ایرانیان#فونیکس #علیرضا_ نوروزی #خانواده_ فونیکس
مغز متفکر پهپاد ها چیست؟
رادیو کنترل (Radio Control) به زبان ساده است که یک مولتی روتور یا هر وسیله دیگری که نیاز به کنترل از راه دور دارد را به صورت بی سیم و از طریق امواج رادیویی کنترل میکند.
امروزه رادیو کنترل که به اختصار RC هم گفته میشود ، کاربردهای زیادی از جمله در درب های اتوماتیک ساختمان ها و وسایل نقلیه دارد که از راه دور توسط ریموت و امواج رادیویی ، فرمان را منتقل میکند.
در ادامه به معرفی بخش های مختلف Radio Control و کاربرد آن در پرنده های بدون سرنشین می پردازیم.
در ابتدا لازم است شما انواع سیستم رادیو کنترل را بشناسید :
نوع اول: Portable

نوع دوم: Ground station

معرفی انواع سیستم رادیو کنترل :
رادیو کنترل Portable
به رادیو کنترل های کوچک و قابل حملی گفته می شود که برای انواع وسایل و اسباب بازی های کوچک استفاده میشود مثل هواپیمای رادیو کنترل و مولتی روتورها و قایق ماشین و…
رادیو کنترل Ground station
ایستگاه کنترل زمینی (GCS) یک مرکز کنترل زمینی یا دریایی است که امکانات کنترل انسانی وسایل نقلیه هوایی بدون سرنشین (پهپادها یا “هواپیماهای بدون سرنشین“) را فراهم می کند.
پهپادهای کوچکتر را می توان با فرستنده سبک “دوقلو” ، که برای هواپیماهای مدل کنترل شده رادیویی استفاده می شود ، کار کرد. گسترش این راه اندازی با رایانه لپ تاپ یا رایانه لوحی ، تبلت داده ها و فیلمبرداری و آنتنها ، یک ایستگاه کنترل زمینی را ایجاد می کند.واحدهای GCS بزرگتر نیز موجود هستند که به طور معمول در موارد پرواز جای می گیرند. مانند واحدهای کوچکتر ، آنها دارای یک کامپیوتر داخلی هستند که نرم افزار GCS را اجرا می کند ، به همراه لینک های ویدیویی و داده. صفحه های بزرگ منفرد یا دوتایی نیز نصب شده اند که می توانند درخشندگی بالایی داشته باشند یا با روکش ضد تابش مورد استفاده قرار گیرند تا دید در نور آفتاب روشن افزایش یابد. آنها می توانند روی زمین ، روی یک میز قابل حمل قرار بگیرند ، یا دارای پاهای تاشو یکپارچه باشند.
برخی از واحدهای قابل حمل GCS در طرح (Hands On Throttle And Stick) قرار دارند. این طرح شامل یک جوی استیک 3 محوره برای کنترل خمیازه ، پیچ و غلتک پهپاد است. یک لغزنده اسلاید یا T-bar می تواند هوای پهپاد را افزایش یا کاهش دهد.
نرم افزار GCS:
نرم افزار GCS به طور معمول بر روی یک کامپیوتر مبتنی بر زمین اجرا می شود که برای برنامه ریزی و پرواز یک مأموریت استفاده می شود. این یک صفحه نقشه فراهم می کند که در آن کاربر می تواند نقاط راه را برای پرواز تعریف کند و پیشرفت این ماموریت را مشاهده کند. همچنین به عنوان “کابین خلبان مجازی” عمل می کند ، بسیاری از ابزارهای مشابه هواپیماهای سرنشین دار را نشان می دهد.
چهار ویژگی اصلی سیستم رادیو کنترل ها
ویژگی اول :فرکانس کاری
ویژگی دوم : مدولاسیون
ویژگی سوم :کانال های اصلی
ویژگی چهارم : گیرنده یا ریسیور
معرفی ویژگی ها :
فرکانس کاری رادیو کنترل ها:

در حال حاظر اکثر RC ها بر روی فرکانس 2.4 گیگاهرتز کار می کنند. در رادیو کنترل های امروزی از شیوه کد گزاری برای از بین بردن تداخل استفاده می شود و در هنگام اتصال گیرنده به رادیو کنترل یک کد خاص به گیرنده تعلق می گیرد و هنگامی که ارتباط بین آن ها برقرار شد و اصطلاحا با هم جفت شدند ، گیرنده فقط از همان رادیو کنترل فرمان می گیرد. به طور مثال که اگر شما چند رادیو کنترلر را با هم روشن کنید و در حال کار با مولتی روتور های خود باشید مشکل قطع شدن ارتباط و تداخل را ندارید.
فرکانس های دیگری مانند 900 مگاهرتز یا 433 مگاهرتز نیز وجود دارند که برای رادیو کنترل های با برد بالاتر استفاده می شوند. استفاده از فرکانس 900 مگا هرتز بنا به دلایلی در برخی کشور ها ممنوع است .
به فرکانسی که رادیو کنترل، امواج رادیویی را برای کنترل مولتی روتور ارسال میکند، فرکانس کاری می گویند.
در رادیو کنترل ها غالبا از دو تا فرکانس اصلی استفاده میشه:
فرکانس٧٢ مگاهرتز
این فرکانس برد زیاد و احتمال تداخل با بقیه را دارد.
فرکانس ۲.۴ گیگاهرتز
این فرکانس یکی از جدیدترین دستاوردها در امر مدلهای RC است و در حال حاضر فرکانس ارتباطی که اکثر رادیو کنترل ها از آن استفاده میکنند، ۲.۴ گیگاهرتز است که برد و احتمال تداخل کمتری نسبت به ٧٢ مگاهرتز دارد.
البته فرکانس های دیگری همانند 1.3Ghz یا 900MHz یا 433MHz و… هم وجود دارد که معمولا برای رادیوکنترل های با برد بالا استفاده می شوند.
برد RC :
همانطور که گفتیم ، امروزه اکثر Radio Control ها با فرکانس ۲/۴ گیگاهرتز کار میکنند.این RC ها دارای قدرت خروجی 100 میلی واتی هستند که در فضای مناسب بردی میتوانند ماکزیمم تا ۵ کیلومتر برد مفید داشته باشند.
تداخل امواج :
چنانچه دو یا چند فرستنده بر روی یک فرکانس مشخص اقدام به انتشار موج کنند ، امواج آنها با هم تداخل خواهند داشت مگر آنکه :
- قدرت انتشار امواج آنها در محل گیرنده یکسان نباشد.
- فرستنده ها از مدولاسیون های متفاوت استفاده نمایند . بطور مثال یکی امواج را با مدولاسیون ( AM ) و دیگری با مدلاسیون ( FM ) پخش نماید.
- هر فرستنده ، امواج خروجی را بگونه ای کدگذاری کند که فقط گیرنده خاصی قادر به شناخت و کدینگ آن باشد.
کدینگ:
در کدینگ سیگنال اطلاعات با استفاده از الگوریتم های خاصی بهم میریزند و برای از بین بردن تداخل ،کدگذاری می شود و سپس یه صورت سیگنال خروجی در فرکانس مشخص منتشر می شود.
در مولتی روتور ها و بسیاری از وسایل بی سیم مثل موبایل ها که فرکانس یکسانی دارند از روش کدینگ برای جلوگیری از تداخل امواج استفاده میشود
کانال های یک رادیو کنترل:

Radio Control بسته به تعداد فرامینی که میتواند به صورت جداگانه به گیرنده ارسال کند نام گذاری می شود که این نام گذاری کانال نامیده میشود و هر کانال یکی از وظایف مشخص و تعیین شده را انجام میدهد .
به طور مثال به رادیو کنترلی که بتواند ۴ فرامین جداگانه به رسیور ارسال نماید رادیو کنترل ۴ کاناله می گویند که متداولترین رادیو کنترل ها می باشند و فرامین اصلی را اجرا میکنند.
یکی از مهم ترین ویژگی های رادیو کنترل ها تعداد کانال ( هر فرمان متفاوت یک کانال نامیده می شود ) آنها است. در حالت کلی چهار کانال اصلی وجود دارد که عبارتند از :
1-تراتل (throttle) برای کنترل سرعت چرخش موتور یا موتور ها – و در مولتی روتور ها برای تغییر ارتفاع پرنده.
وقتی دور موتورها را با کانال تراتل زیاد و کم می کنیم یک کانال است(از بالا تا پایین یک کانال است). دقت کنید تنها اهرمی که فنری نیست همین اهرم مربوط به گاز است یعنی هرچه بیشتر گاز بدیم موتورها تندتر میچرخن و برای کاهش گاز باید اهرم رو با نیروی دست به سمت پایین بیاریم و اینجوری نیست که فنری باشه و خودش بیاد پایین. دلیلش هم اینه که ما دور موتورها رو در وضعیت های دلخواه خودمون می خواهیم.
2- ایلِران (aileron) برای کنترل حرکات در محور رول (roll ) و در مولتی روتور ها برای حرکت پرنده به چپ و راست.
اگر بخواهیم ربات را به سمت چپ حرکت دهیم جوی استیک سمت راست را به سمت چپ یعنی جایی که نوشته شده Roll Left حرکت می دهیم. و برای اینکه ربات به سمت راست حرکت کند اهرم سمت راست را به سمت راست در جایی که نوشته شده Roll Right حرکت می دهیم. به این دو حرکت با هم یک کانال اختصاص می دهیم.
3-الویتور (elevator ) برای کنترل حرکات در محور پیچ (pitch ) و در مولتی روتور ها برای حرکت پرنده به جلو وعقب.
اگر بخواهیم ربات را به سمت جلو حرکت دهیم جوی استیک سمت راست را به سمت بالا درجایی که نوشته شده Pitch Up حرکت می دهیم و برای اینکه ربات به سمت عقب حرکت کند اهرم سمت راست را به سمت پایین در جایی که نوشته شده Pitch Down حرکت می دهیم. به این دو حرکت با هم یک کانال اختصاص می دهیم.
4-رادر (rudder ) برای کنترل حرکات در محور یاو (yaw ) و در مولتی روتور ها برای چرخش پرنده در جهت یا خلاف جهت عقربه های ساعت به دور خود. هنگامی که ربات با استفاده از کانال Yaw یا همان Rudder به دور خودش میچرخد هم می تواند ساعتگرد به دور خودش بچرخد و هم می تواند پاد ساعتگرد به دور خودش بچرخد. به این دو نوع چرخش که با Yaw Left و Yaw Right انجام می دهیم یک کانال اختصاص می دهیم.
این چهار کانال به عنوان کانال اصلی برای کنترل حرکات انواع پرنده ها اعم از مولتی روتورها ، هواپیمای بدون سرنشین و هلیکوپتر های RC هستند .
کانال های بیشتر می توانند به عنوان کنترل بخش های دیگری از مولتی روتور شما باشند. به عنوان مثال اکثر مولتی روتور ها یک کانال پنجم به عنوان تغییر دادن مد های پرواز دارند یا حتی کانال 6 برای تغییر دادن و کنترل زاویه دوربین.
مود رادیو کنترل:
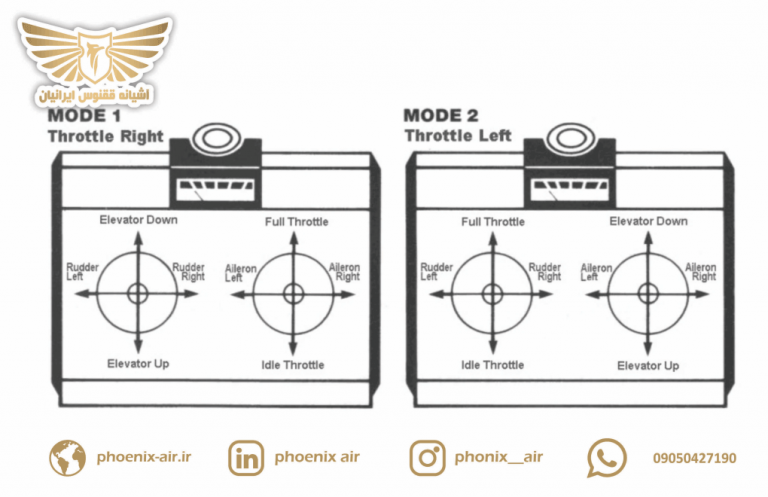
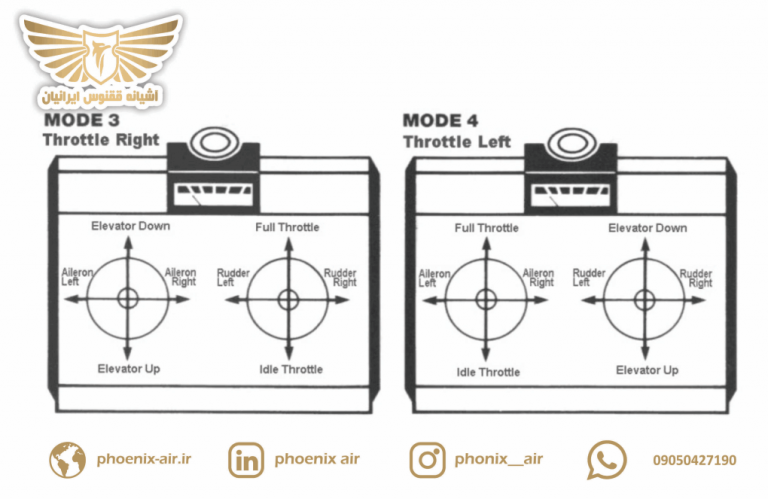
در رادیو کنترل ها نحوه چیدن استیک های کنترل متفاوت است که در تصویر پایین انواع مختلف آن را مشاهده می کنید.
در قاره آسیا و اروپا به ویژه در ایران از مد 2 ( MODE 2 ) برای نحوه فرماندهی استیک های رادیو کنترل ها استفاده می شود .
هنگامی که برای خرید رادیو کنترل ( Radio Control ) اقدام می کنید ، حتما به تعداد کانال های مورد نیاز برای کنترل مولتی روتور خود دقت کنید. هر چه تعداد کانال بیشتر باشد قیمت رادیو کنترل نیز بالاتر می رود .
بخش گیرنده: ( Receiver)

اندازه رسیور بسیار کوچک و سبک است و روی مولتی روتور سوار میشود ، در رادیو کنترل ها بحث کانال بسیار مهم است هر کانال یک خروجی PWM است که مشخصات موج با توجه به نوع ربات مثلا ( مولتی روتور ، ماشین ، قایق و … ) ممکن است متغیر باشد . وقتی می گویند یک رادیو کنترل ۴ کاناله است به معنی است که خروجی این رادیوکنترل دارای ۴ عدد PWM است که توسط ما کنترل می شود . کانال های PWM دارای یک فرکانس ثابت ( مثلا ۵۰ هرتز ) و پهنای پالس متغیر هستند ، به عنوان مثال اگر ما یک فرستنده رادیوکنترل داشته باشیم که روی آن یک ولوم وجود داشته باشد در مقابل این ولوم در گیرنده ( رسیور ) یک سیم خروجی داریم ، وقتی ما این ولوم را کم و زیاد می کنیم در خروجی گیرنده ، ولتاژ کم و زیاد می شود و اگر یک ال ای دی را به آن وصل کنیم ، با چرخش ولوم نور ال ای دی تغییر می کند. به این میگن یک کانال . این ولتاژی که ازش حرف زدیم از یک خروجی PWM تولید می شود که دارای فرکانس و دامنه معینی است و ابتدای صفر و انتهای یک آن تنظیم شده است .
حالا به توضیح اهرم ها و کلید های روی رادیو کنترل می پردازیم .


در تصویر بالا کلی دکمه و المان می بینید ولی از بین این همه المان تنها به چهار مورد آن نیاز اساسی داریم ، سایر المان ها برای تنظیمات رادیوکنترل استفاده می شوند

در تصویر بالا موارد ۱ و ۲ ولوم عادی هستند و قابلیت چرخش دارند و ممکن است در سایر رادیوکنترل ها این دو موجود نباشند ولی موارد ۳ و ۴ حتما در همه رادیوکنترل ها وجود دارد . این دو ، جوی استیک های اصلی رادیوکنترل می باشند . هر جوی استیک دو محور x و y دارد که هر محور یک کانال است . پس یک جوی استیک در کل ۲ کانال محسوب می شود . حرکت در راستای y یعنی بالا و پایین یک کانال است و در راستای x یعنی چپ و راست هم یک کانال حساب می شود . با این اوصاف دو جوی استیک ۳ و ۴ با هم ۴ کانال را ایجاد می کنند . که هر کانال نام مخصوص به خود و وظیفه مخصوص به خود را دارد .
در اکثر موارد ، محور y جوی استیک شماره ۳ قابلیت فنری ندارد ، اسم این محور تراتل ( Throttle ) است که مربوط به گاز دادن یا همان افزایش سرعت ملخ ها می باشد . هنگامی که می خواهیم ربات را به پرواز دربیاوریم آرام آرام آن را به سمت بالا حرکت می دهیم تا سرعت موتور ها زیاد شود و ربات شروع به پرواز کند . سایر محور های دو جوی استیک قابلیت فنری دارند یعنی اگر اهرم جوی استیک را رها کنید جوی استیک در مرکز قرار می گیرد . محور x جوی استیک شماره ۳ رادر ( Rudder ) نام دارد که مربوط به گردش حول محور z (محور عمود بر ربات ) می باشد یعنی با حرکت اهرم جوی استیک در این محور ، می توانیم جهت جلوی ربات را تغییر دهیم . اگر رادر را به سمت چپ حرکت دهیم ربات باید حرکت پادساعتگرد کند و اگر به سمت راست حرکت دهیم باید چرخش ساعتگرد انجام دهد .
محور y در جوی استیک شماره ۴ ، الویتور ( Elevator ) نام دارد که مربوط به حرکت عقب و جلوی ربات میشود . یعنی اگر جوی استیک شماره ۴ را به سمت بالا ببریم ، ربات به سمت جلو می رود و اگر به سمت پایین بیاوریم ربات به سمت عقب می آید . محور x در جوی استیک شماره ۴ ایلران ( Aileron ) نام دارد که مربوط به حرکت چپ و راست ربات می شود .
پارامتر های مهم در انتخاب رادیوکنترل :
برد رادیوکنترل : یکی از ملاک هایی که قبل از خرید رادیو کنترل باید به آن دقت کنیم برد رادیو کنترل است ، برد رادیو کنترل های تجاری معمولاً بین ۲۰۰ متر تا ۲۰۰۰ متر است ، معمولاً فرکانس کاری اکثر رادیو کنترل های موجود ۲٫۴ گیگاهرتز است که همین باعث میشود برد مشابهی و دور و برد ۱۰۰۰ متر داشته باشند.
تعداد کانال : همان طور که پیش تر بحث کردیم تعداد کانال لازم برای هدایت کامل یک مولتی روتور چهار کانال می باشد ، اما اگر می خواهید امکانات دیگری به ربات اضافه کنید ( مانند دوربین یا حمل بار و… ) باید رادیو کنترلی با تعداد کانال متناسب با فعالیت ربات تهیه کنیم ، هرچه تعداد کانال بیشتر باشد قیمت هم بیشتر میشود.
امنیت اطلاعات : اگر برای مسابقات رباتیک خودتان را آماده می کنید باید یک رادیو کنترل ضد گلوله تهیه کنید ، معمولاً رقبا برای اینکه خودشان به مرحله نهایی برسند سعی می کنند از راه های مختلفی مانند نویز انداختن ، کنترل ربات و … مانع پیشرفت رقیب خود شوند ، اگر رادیو کنترل معمولی و بی کیفیت تهیه کنید به راحتی با ایجاد نویز فرکانسی می توانند در کارکرد رادیو کنترل شما اختلال ایجاد کنند و یا می توانند کنترل ربات شما را در دست بگیرند ،(البته در مسابقات قوانین وجود دارد که مانع این کار میشود ولی ما باید همه چیز را در نظر بگیریم).
امکانات رادیو کنترل : قبل از خرید رادیو کنترل تحقیق کنید که رادیو کنترل که مد نظر دارید چه امکاناتی دارد و برای چه کاربردی تهیه شده طراحی شده است و ….
برند رادیو کنترل : به برند رادیو کنترل توجه کنید بعضی از برند ها محصولات خود را با کیفیت و از قطعات عالی تهیه می کنند و بعضی هم یه اسباب بازی به اسم رادیو کنترل تهیه می کنند ، البته توجه کنید برند های خوب و معتبر وارد کشور نمی شوند ، تنها اجناس عادی حق واردات دارند ، در زمینه رادیو کنترل یک سری ملاک ها تعیین شده اند که رادیو کنترلی که می خواهد وارد کشور شود باید از ان فیلتر عبور کند .
کلام آخر:
ما مفتخریم اعلام کنیم که فعالیت های ما تنها محدود به کلاس های علمی و آموزشی نمی باشد .
بلکه ما در فونیکس فرصتی را پدید آورده ایم که به کمک آن می توانید در وقت و هزینه خود صرفه جویی کنید و بازدهی را به طور چشمگیر افزایش دهید. زیرا در جامعه امروزی که نیاز ها تغییر کرده اند.
راه حل های قدیمی جوابگوی مشکلات جدید ما نیستند و ما قادر خواهیم بود. با دانش و تخصص خود بهترین راه حل را برای شما به ارمغان آوریم با ارائه ی فعالیتهای صنعتی شرکت فونیکس ساخت و تولید انواع پهپادو هواپیمای بدون سرنشین خدمات پس از فروش تعمیرات ، آموزش پرسنل و … در خدمت شماست.
همچنین با طراحی دلخواه شما در زمینه های صنعتی و تفریحی به صورت اختصاصی (طراحی انواع هواپیما ،بالن و …)شما را همراهی می نمائیم.
#فونیکس_رویاهات_باش #آشیانه_ ققنوس_ ایرانیان#فونیکس #علیرضا_ نوروزی #خانواده_ فونیکس
معرفی نرم افزار های تیم طراحی هواپیما
نرمافزارهای طراحی تعداد محدودی نیستند هر ساله برنامه نویسان این حوزه آپدیت ها و افزونه های جدیدی را به این نرم افزارها اضافه میکند ما قصد داریم مطرح ترین های این نرم افزارها را که در دنیا و ایران استفاده می شوند معرفی کنیم.
دسته بندی تیم طراحی هواپیما
- تیم طراحی هواپیما به سه گروه تقسیم میشوند:
گروه اول: گروه سازه
این گروه سازه وسیله را طراحی میکنند که نرمافزارهای مورد استفاده برای این گروه کرل دراو و کتیا است.
نرم افزار کورل دراو نرم افزاری دو بعدی برای طراحی اجسام است که به عنوان نقشه کشی مثل نرم افزار اتوکد از آن استفاده می شود که این نرم افزار در واقع تلفیقی از فتوشاپ و اتوکد می باشد.
نیز یکی از صنعتی ترین نرم افزارها در حوزه طراحی سه بعدی یا 3D میباشد.
گروه دوم : گروه پایداری
این گروه از نرم افزار Digital DatCam استفاده می کنند که در سایت ما می توانید این نرم افزار را دانلود و استقاده کنید.
گروه سوم:گروه آیرودینامیک و تحلیل
نرم افزارهای مورد استفاده در گروه سوم Fluent و Ansys است که بهترین نرم افزارها برای تحلیل آیرودینامیک بدنه یا سازه پرنده (پهپاد و یا هواپیما ) هستند.
این نرم افزار ها جزو پرکاربردترین ها در ایران و دنیا هستند و ما میخواهیم ۱۰ تا برترین نرم افزارهای سال ۲۰۲۰ را به شما معرفی کنیم.
معرفی نرم افزار های برتر:
نرم افزار SharkCad Pro

نام نرم افزاری جدید و بسیار قدرتمند در زمینه مدل سازی انواع محصولات صنعتی به صورت 3 بعدی است. همانطور که مستحضر هستید، امروزه بسیاری از مراحل طراحی و تولید محصولات به کمک نرم افزارهای مخصوص انجام میگیرند. توسعه و رشد قابل توجه کاربرد نرم افزارهای تخصصی در این زمینه، سبب شده که دقت و کیفیت محصولات تولیدی به حد قابل توجهی افزایش پیدا کند. به عنوان مثال، محصولاتی که تا چند دهه قبل با آزمون و خطای بسیار به نتیجه نسبتا مطلوب میرسیدند، امروزه در همان خط تولید اولیه دارای بهترین کیفیت ممکن هستند.
علت این مسئله را نیز باید در قابلیت طراحی و شبیه سازی نرم افزارها جستجو کرد. امروزه نرم افزارهای طراحی به کمک کامپیوتر (CAD)، متناسب با هر نیاز و زمینهای در دسترس افراد قرار دارند. از این رو، مهندسین میتوانند جنبههای مختلف محصول خود را با جزئیات بسیار طراحی نمایند. نکته کلیدی در این حوزه این است که با بهرهگیری از این نرم افزارها، میتوان کیفیت محصول نهایی را با صرف هزینه ای بسیار کمتر افزایش داد. نرم افزاری برایتان آماده کردهایم، یکی از نرم افزارهای حرفهای در زمینه طراحی و مدلسازی 3 بعدی محصولات است که مهندسین مختلف را قادر میسازد تا حتی جزئیترین جنبههای محصول خود را طراحی و آن را به آزمون بگذارند. هم اکنون می توانید جدیدترین ورژن نرم افزار SharkCad Pro را از سایت ما دریافت نمائید.
ویژگی های نرم افزار SharkCad Pro :
– دارا بودن یک مجموعه قدرتمند برای مشبندی محصولات
– قابلیت مدلسازی مش و سطوح قطعات
– امکان طراحی جزئیترین بخشهای محصول نهایی
– قابلیت مدلسازی با انواع ناصر از قبیل فلز، چوب و …
– مناسب برای پرینترهای 3 بعدی
– دارا بودن قابلیت محاسبات بسیار دقیق
نرم افزار ADS 2016

امروزه یکی از مهم ترین نیازمندیهای رشته های مهندسی، وجود نرم افزارهای معتبر برای شبیه سازی و بررسی طرح های ارائه شده است، قبل از ساخت عملی آنهاست. با پیچیده تر و پیشرفته تر شدن علوم مهندسی، نیاز به این ابزارهای شبیه سازی و طراحی به کمک کامپیوتر (CAD) روز به روز بیشتر احساس می شود. از طرفی امروزه یکی از قابلیت هایی که یک مهندس باید دارا باشد آشنایی با تعدادی از نرم افزارهای مرتبط با رشته مربوطه است. از مهم ترین رشته های مهندسی که دانشجویان، اساتید و متخصصان آن باید توانایی کار با نرم افزار را داشته باشند، رشته مهندسی برق است. از آن جایی که غالب گرایش های این رشته مبتنی بر محاسبات و تحلیل های سنگین ریاضی است، این نیاز بیشتر از سایر رشته ها احساس می شود. شرکت Agilent EESof EDA، یکی از شرکت های معروف در زمینه تولید تجهیزات مخابراتی و نرم افزارهای شبیه سازی و تحلیل مدارهای مخابراتی و الکترونیکی است که کار خود را از سال 1983 شروع و تا به امروز ادامه داده است. نرم افزار Advanced Design System یا ADS، محصول این شرکت، یکی از پرطرفدارترین ابزاری موجود در طراحی و تحلیل مدارهای RF، مایکروویو، تجزیه و تحلیل فرکانسی هارمونیک ها و مدارت آنالوگ، مدارها و سیستم های مخابراتی آنالوگ و دیجیتال است. نرم افزار ADS، در نسخه های جدید قابلیت های نوین از جمله تحلیل سه بعدی الکترومغناطیسی، ایجاد ارتباط بین نرم افزارها و سخت افزارهای شناخته شده توسط خود شرکت Agilent و تجهیزات صنعتی مخابراتی فراهم کرده است. نرم افزار ADS در حال حاضر یکی از بهترین روش ها در تجزیه و تحلیل انواع مدارهای مخابراتی و الکترونیکی آنالوگ و دیجیتال است.
امکانات نرم افزار 2016 ای دی اس
- از عمده ترین امکانات نرم افزار ADS می توان به موارد زیر اشاره کرد.
- تجزیه و تحلیل DC مدار
- تجزیه و تحلیل AC مدار
- محاسبه اثر نویزهای حرارتی و خطی
- تجزیه و تحلیل تقویت کننده های توان
- محاسبه و شبیه سازی نقطه کار مدارهای الکترونیکی
- تجزیه و تحلیل گذرا یا Transient
- تحلیل هارمونیک بالانس (Harmonic Balance یا HB) مدار
- تحلیل پارامترهای پراکندگی مدارهای فرکانس بالا (پارامترهای S)
- تنظیم کردن پارامترهای مدار برای بررسی اثر پارامترها برعملکرد مدار و به دست آوردن پاسخ های مناسب (Tuning)
- بهینه سازی برای تعیین مقادیر بهینه پارامترهای مهم مدار
- قابلیت کار با مدارهای چاپی (Layout)
- برقراری ارتباط بین دو محیط طراحی مدارهای چاپی (Layout) و محیط شماتیک (Schematic)
- محیط شبیه سازی الکترومغناطیسی مبتنی بر دو روش مومنت (Moment Method) و المان محدود (Finite Element)
- طراحی و بهینه سازی انواع فیلترهای آنالوگ و دیجیتال
- محاسبه و سنتز خطوط انتقال و مدارات مایکرواستریپ
- کار با نمودار اسمیت چارت
- شبیه سازی هوشمند (Smart Simulation)
- محاسبه پارامترهای پراکندگی MOSFET
نرم افزار NX

شرکت نرمافزاری SIEMENS PLM که قبلا با نام UGS شناخته میشد متخصص در زمینهی PLM (مخففProduct Lifecycle Management و به معنی مدیریت چرخهی عمر محصول) است؛ یکی از نرمافزارهای مشهور و پرکاربرد این شرکت نرمافزار NX با نام قبلی Unigraphics است که از قویترین و پیشرفتهترین نرمافزارها در زمینههای طراحی، مهندسی و ساخت به کمک رایانه (CAD، CAM و CAM) و نیز PLM میباشد که همهی این زمینهها را بهصورت کاملا یکپارچه و هماهنگ در اختیار مهندسان قرار میدهد.
این نرمافزار با امکانات فراوانی که در اختیار کاربر قرار میدهد، موجب طراحی و ساخت سریعتر و ارزانتر محصولات پیچیده و نیز کاهش هزینههای طراحی تا ساخت محصول میشود. همچنین بهدلیل استفاده از هستهی مرکزی مدلسازی، این نرمافزار توانایی مدلسازی بسیار بالایی دارد و سرعت بالای طراحی و حجم کوچکتر فایلهای نهایی، آن را از رقبا متمایز میکند. CATIA و Pro/ENGINEER از جمله رقبای این نرمافزار هستند.
امروزه این نرمافزار در صنایع مختلفی از جمله هوافضا، خودروسازی، ماشینسازی، عمران، بیومکانیک، فناوریهای برتر (High Tech) و… بهشکل گسترده مورد استفاده قرار میگیرد. از مواردی که با استفاده از این برنامه انجام شده است میتوان به طراحی کامل پیشرفتهترین جنگندهی آمریکا در زمان خود JSF10، طراحی کامل اتومبیل مسابقهی MT900 و طراحی شاسی خودروی مسابقه جگوار برای شرکت در مسابقات فرمول ۱ نام برد.
برخی از امکانات و قابلیتهای این نرمافزار:
– یکپارچگی کامل بین مراحل طراحی، مهندسی و ساخت
– انجام طراحیهای حرفهای صنعتی
– قابلیت طراحی خودکار برخی از بخشهای خودرو و…
– مدلسازی دو و سهبعدی در بهترین و بالاترین سطح
– بررسی و تحلیل استحکام طرح
– مهندسی بر اساس اطلاعات (Knowledge-based engineering یا به اختصار KBE)
– شبیهسازی و تجزیه و تحلیل انواع مکانیزمها مانند حرکت، حرارت، جریان و…
– ساخت و تولید قطعات با کیفیت برتر
– فرایند خودکار قالب تزریق پلاستیک
– طراحی انواع جوش
– کاهش برنامهنویسی NC و نیز زمان ماشینکاری
– به حداکثر رساندن استفاده از منابع تولید
– کنترل کیفیت محصول
نرم افزار OpenVSP -Vehicle Sketch Pad

یک ابزار هندسی پارامتریک هواپیما است که به شما امکان می دهد مدل های سه بعدی را برای هواپیما ایجاد کنید. این ابزار مدل سازی یک نرم افزار طراحی هواپیما با منبع باز است که توسط ناسا طراحی شده است. این یک ابزار بصری است که اجازه می دهد تا به سرعت به سرعت مدل ها ایجاد شود.
نرم افزار SolidWorks
سالیدورکس به )انگلیسی( SolidWorks: یک نرمافزار مهندسی طراحی به کمک رایانه است که بر روی ویندوز اجرا میشود و توسط شرکت فرانسوی داسو سیستمز ساخته شده و همچنان توسعه داده میشود. در حال حاضر نرمافزار سالید ورکس توسط ۱٫۳ میلیون مهندس در بیش از ۱۳۰٬۰۰۰ شرکت در سراسر جهان در حال استفادهاست.این نرمافزار دارای سه محیط به نامهای پارت (part) اسمبلی (assembly) و دراوینگ (drawing) میباشد. محیط اول برای رسم قطعه بوده، در محیط دوم قطعات یک مکانیسم بر روی هم سوار شده و در محیط آخر از آنها نقشه مهندسی (معمولاً برای نسخه چاپی) تهیه میشود . در واقع سالیدورک یک برنامه برای مدلینگ یا سه بعدی کردن قطعات صنعتی و جامدات می باشد و برای این کار احجام را بصورت پارامتریک یا واحد های از پیش ساخته کنار هم قرار می دهد.
ویژگی اصلی این نرم افزار عبارتند از:
- سهولت کاربری و آموزش در مقایسه با سایر نرمافزارهای CAD
- سرعت بالاتر نسبت به سایر نرمافزارها
- قابلیت ارتباط با تمامی نرمافزارهای ماشین کاری
- (edge cam, master cam, power mill, …) و نرمافزارهای تحلیل (Ansys, Adams
- Abaqus, Cosmos…)
- فعالیت بهتر و سریع تر.
- امکان معادلهنویسی (Equation) بین پارامترها و اندازههای مختلف در مدل
- امکان استفاده از جداول طراحی (Design Table) به منظور برقراری ارتباط بین اندازهها و معادلات در محیط excel
- کاربرد آسان SolidWorks در نقشه و طرح های پیچیده با هزاران عامل.
- امکان ایجاد نماهای انفجاری (exploded view) و تهیه فیلم و انیمیشن از مدل انفجاری در طی مونتاژ یا دمونتاژ شدن مدل
نرم افزار Solid Edge

توسط شرکت آمریکایی زیمنس پی ال ام ساخته شده و همچنان توسعه داده میشود.
رقبای اصلی نرمافزار سالید اج در بازار سالیدورکس، اینونتور و مکانیکال دسکتاپ میباشد.
در محیطهای این نرمافزار نیز مانند سایر نرمافزارها دارای سه محیط به نامهای پارت(part) اسمبلی (assembly)و دراوینگ(drawing)میباشد که با استفاده از آنها میتوان طراحی یک قطعه یا یک مجموعه را به واقعیت تبدیل کرده و مدارک فنی مستندی از طرح ایجاد نمود. همچنین در زمینه مهندسی معکوس این نرمافزار دارای کارایی و دقت بالایی میباشد.
اساس مدل سازی در این نرمافزار (solid) میباشد ولی جهت مدل کردن سطوح پوستهای پیچیده از دستورات (Surface) نیز میتوان استفاده نمود. از طرفی توان Solid Edge در طراحی مدلهای ورق کاری بسیار قابل تحسین است و دارای دستورات متعددی برای ورق کاریهای ساده تا پیچیده میباشد. اما قویترین ماژول Solid Edge محیط مونتاژ (Assembly) آن میباشد و به سادگی میتوان تک تک قطعات مدل شده را بر روی هم مونتاژ نموده و در آنجا هر یک از قطعات را از جهت نحوه انجام وظیفه در مجموعه بررسی نمود و در صورت نیاز، اصلاح یا بهینه نمود؛ در نهایت با اعمال انواع قیدهای حرکتی مجموعه را به صورت دینامیکی شبیهسازی کرد و حتی میتوان از حرکت طرح با فرمتهای ویدئویی استاندارد، فیلم تهیه نمود. برای مثال میتوان در محیط قالب سازی این نرمافزار از ابتدا یک قطعه را طراحی نمود سپس همانجا قالب تولیدی قطعه را طراحی نمود و از جهت درستی قالب و خروج قطعه سالم از آن تحلیل و بهینه نموده، سپس حرکت باز و بسته شدن قالب را با استفاده از قیدهای حرکتی موجود به قالب اعمال کرده و در نهایت یک فیلم ویدویی کامل از مجموعه قالب و نحوه کارکرد آن تهیه کرد و به عنوان پروژه قبل از ساخت به مشتری یا کارگران فنی کارگاه ارائه نمود.
نرم افزار PTC Creo
شرکت آمریکایی PTC بر اساس آخرین گزارشها انتشار یافته از منابع علمی و تحقیقاتی به عنوان بهترین نرمافزار سری cad/cam/cae در جهان شناخته میشود که شرکت کوچک و بزرگ تخصصی در دنیا بر اساس نوع فعالیتشان از قسمتهای مختلف این نرمافزار بهره میبرند.
نرمافزار Pro/ENGINEER دارای محیطهای تخصصی مختلفی مانند مدلسازی، قالبسازی، نقشهکشی، مونتاژ، ماشینکاری، آنالیز و… میباشد که تمامی این محیطها به صورت پارامتریک به هم متصل میباشند. در محیطهای مدلسازی نرمافزار امکان مدل نمودن انواع اشکال و قطعات هندسی و غیر هندسی به روشهای توپر (SOLID) و پوستهای (SURFACE)میسر بوده و برای اینکار یکسری دستورها مدلسازی پایهای وجود دارد و در کنار آن برای مدلسازی اشکال خاص تر میتوان از دستورها پیشرفته نیز کمک گرفت. در ضمن برا ی مدلسازی قطعات غیر هندسی با سطوح پیچیده (FREE FORM) محیط جداگانهای به نام STYLE وجود دراد و در آخر جدیدترین متد مدلسازی حرفهای یعنی روش ابر نقاط نیز در محیط دیگری صورت میپذیرد.
در این نرمافزار، تمامی مدلها به صورت کاملاً سه بعدی طراحی و ساخته میشوند و در هر زمان قابلیت ویرایش را دارند. نخست تکههای مورد نیاز به گونه جداگانه ساخته میشوند و سپس آنها را در کنار هم گذاشته و تکه پیچیده تری را میسازند. این نرمافزار قابلیت مدلسازی به شیوه (NURBS) را دارا میباشد.
ویژگی اصلی این نرم افزار عبارتند از:
- بنا شدن مدلسازی در Pro/E بر اساس مدلسازی سه بعدی صلب (solid)، در صورتی که اکثر نرمافزارهای دیگر کار مدلسازی را تنها با استفاده از سطحسازی انجام میدهند
- تعریف شدن تمام ابعاد به صورت پارامتر در مدل ساخته شده توسط این نرمافزار، بدین ترتیب اگر در ساخت مدل سه بعدی رابطهای بین این پارامترها وجود داشته باشد به راحتی میتوان با تغییر یکی از این پارامترها، دیگر پارامترها یا ابعاد را تغییر داد
- اعمال خودکار کوچکترین تغییر در مدل طراحی شده در هر زمانی از مراحل تکاملی ساخت قطعه یا سیستم بر روی قسمتهای دیگر مانند اسمبلی، نقشه دو بعدی و روی اطلاعات ساخت به صورت همزمان
- وابستگی دوسویه: یعنی اگر اندازههای یک بخش را بگردانیم، همه بخشهای نمونه سهبعدی دیگر هم به همان نسبت بزرگ و کوچک میشوند و برعکس.
- این برنامه قابلیت کار کردن به صورت لایو با نرمافزار تحلیلی نظیر کامسول را دارد.
- این برنامه در سامانههای ویندوز، لینوکس، سولاریس کار میکند و پروندههایی با پسوندهای زیر را میسازد:
- ) prt. قطعه): پسوندی برای تک تک یگانهای ساخت
- asm.( گروه): پسوندی برای گروه چند بخش جداگانه
- ) drw. کشیدن): پسوندی برای پروندههای طراحی
تمامی پسوندهای نرمافزارهای مهندسی در این نرمافزار قابل شناسایی بوده و قابلیت انتقال فایلها و تبدیل به دیگر نرمافزارها را نیز دارا میباشد.
- دارای محیط ماشین کاری
- دارای تحلیل و تزریق شماتیک پلاستیک و تحلیلهای مکانیکی و انیمیشنسازی (مکانیزمها) و تحلیل آنها در ماژورهای وابسته به خود.
- دارای ابزارهای برای ترسیم و طراحی و دسترسی آسان به ابزارهای ترسیم و ویرایش.
نرم افزار SketchUp

نرم افزار اسکچاپ یکی از سودمندترین نرم افزارهایی است که یادگیری آن سبب افزایش بهره وری در شما می گردد و به این ترتیب می توانید با استفاده از طراحی های خلاقانه و هم چنین تکنیک های متنوع موجود در اسکچاپ می توانید نظر مثبت مشتریان را به طرح های خود جلب نمایید و به این ترتیب تعامل خود با مشتریان را بهبود ببخشید.
با استفاده از نرم افزار اسکچاپ می توانید طرح های با کیفیت تر و با دقت بیشتری را طراحی و پیاده سازی نمایید.
سادگی و حجم پایین در اسکچاپ :
از مهم ترین ویژگی های نرم افزار اسکچاپ می توان به سادگی آن و همچنین حجم پایین این نرم افزار و سهولت یادیگری آن اشاره نمود، علاوه بر آن SketchUp دارای واسط کاربری مناسبی می باشد و بسیاری از کاربران محیط آن را می پسندند و به آسانی می توانند به یادگیری این نرم افزار بپردازند.
کتابخانه های سه بعدی در اسکچاپ :
کتابخانه های سه بعدی مناسبی در SketchUp قرار دارد که کاربران با استفاده از آن می توانند طراحی های مورد نظر خود را ایجاد نموده و با کاربران دیگر به اشتراک بگذارند.

نرم افزار CATIA مخفف کلمات (Computer Aided Three-dimensional Interactive Application) یک نرمافزار طراحی به وسیله کامپیوتر (CAD)، مهندسی تحلیل با کامپیوتر (CAE) و ساخت به کمک رایانه (CAM) است که شرکت داسو سیستم (Dassault System) آنرا تولید کرده است. نرم افزار کتیا CATIA یکی از نرم افزار های محبوب دنیا می باشد که در صنایع مختلف نظیر خودروسازی، هوا فضا، لوازم خانگی، عمران، مکانیک دریایی و… کاربرد فراوان دارد.
کاربرد های نرم افزارCATIA:
- طراحی و مدل سازی سطوح و قطعات پیچیده در کتیا
- طراحی پروسه ماشینکاری وتولید و استخراج G-code برای دستگاههای تراشکاری cnc جهت ساخت قطعه
- طراحی و تحلیل مکانیزمها،سیستم ها و تجهیزات هیدرولیکی، پنوماتیکی، الکتریکی و…
- طراحی قالب ومدلهای ورق کاری در catia
- شبیهسازی توسط نرم افزار catia
خصوصیات نرم افزار کتیا :
- رابط گرافیکی بسیار قدرتمند و کاربر پسند (user-Friendly) بودن آن
- ایجادنمودار درختی در کتیا که باعث تسهیل کار کاربر میگردد.
- ویژگی ساخت مدلهای مرکب از سطوح و احجام
- دارا بودن تاریخچه (History) جهت برگرداندن تغییرات اعمالی به مدل
- هوشمندی در بهکارگیری دستورات
- امکان تعریف ابعاد وابسته
- امکانتخصیص ابعاد به قطعه بصورت پارامتریک
- نرمافزار کتیا را می توان از طریق رابط های برنامه نویسی (API) سفارشی کرد. V4 با زبان های برنامه نویسی فرترن (FORTRAN) و C تحت رابط برنامه نویسی CAA سازگار است و V5 با زبان های برنامه نویسی Visual Basic و C++ تحت رابط برنامه نویسی CAA2 یا CAA V5 مطابقت دارد.
کلام آخر
ما مفتخریم اعلام کنیم که فعالیت های ما تنها محدود به کلاس های علمی و آموزشی نمی باشد .بلکه ما در فونیکس فرصتی را پدید آورده ایم که به کمک آن می توانید در وقت و هزینه خود صرفه جویی کنید و بازدهی را به طور چشمگیر افزایش دهید. زیرا در جامعه امروزی که نیاز ها تغییر کرده اند.
راه حل های قدیمی جوابگوی مشکلات جدید ما نیستند و ما قادر خواهیم بود. با دانش و تخصص خود بهترین راه حل را برای شما به ارمغان آوریم با ارائه ی فعالیتهای صنعتی شرکت فونیکس ساخت و تولید انواع پهپاد و هواپیمای بدون سرنشین خدمات پس از فروش تعمیرات ، آموزش پرسنل و … در خدمت شماست.
همچنین با طراحی دلخواه شما در زمینه های صنعتی و تفریحی به صورت اختصاصی
(طراحی انواع هواپیما ،بالن و …)شما را همراهی می نمائیم.
#فونیکس_رویاهات_باش #آشیانه_ ققنوس_ ایرانیان#فونیکس #علیرضا_ نوروزی #خانواده_ فونیکس