شرکت آشیانه ققنوس ایرانیان | علیرضا نوروزی | آموزش ساخت پهپاد | پهپاد
آموزش، طراحی، ساخت، تعمیر و پشتیبانی انواع پرنده های بدون سرنشین (غیرنظامی) www.phoenix-air.irشرکت آشیانه ققنوس ایرانیان | علیرضا نوروزی | آموزش ساخت پهپاد | پهپاد
آموزش، طراحی، ساخت، تعمیر و پشتیبانی انواع پرنده های بدون سرنشین (غیرنظامی) www.phoenix-air.irهواپیما
اجزا و معرفی قسمت های اصلی هواپیما
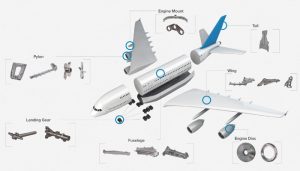
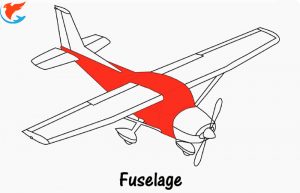
1– بدنه هواپیما ( Fuselage )
بدنه هواپیما قسمت عمده هواپیما را تشکیل می دهد و در واقع سایر قسمت ها و قطعات بطور مستقیم یا غیر مستقیم به آن متصل می شوند.بدنه همه ی هواپیماها از لحاظ طراحی به یکدیگر شباهت و فقط از نظر ابعادی و متعلقات نسبت به هم تفاوت دارند. از نظر عملکرد در هواپیماهای مختلف وظایف بدنه متفاوت خواهد بود ولی به نوعی می توان گفت وظیفه اصلی بدنه در هواپیماها تامین فضای لازم برای نفرات به همراه بار مفید می باشد. علاوه بر وظیفه اصلی اشاره شده بدنه باید دارای فضای کافی برای نصب متعلقات لازم از قبیل مخازن سوخت-ارابه ی فرود-موتور-رادار-قابلیت نصب بال و مجموعه دم-تحمل اختلاف فشار داخل و خارج کابین در صورت پرواز هواپیما در ارتفاع بیش از 10000پایی و دید کافی برای خلبان را داشته باشد.همه ی قابلیت های اشاره شده الزاما در بدنه ی هرهواپیمای وجود ندارد بلکه بدنه هر هواپیما با در نظر گرفتن نوع و ماموریت هواپیما و نیز پیکربندی آن دارای برخی از قابلیت های اشاره شده می باشد.
ساختمان بدنه از نظر سازه ای از اجزای زیر ساخته شده است:
دیواره ی عرضیbulkhead
ستون طولی دیواره ی هواپیماlongeron
قاب چهارچوبframe
ستون های فرعیstringer
سازه های فرعی شکل دهندformer
پوستهskin
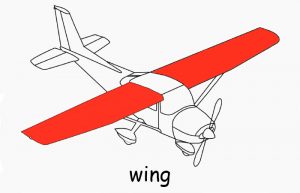
2- بال هواپیما Aircraft Wing
بال هواپیما یا همان Wing ها قسمتی از هواپیما هستند که به هواپیما اجازه می دهند تا به پرواز در بیاید. به واسطه حرکت هواپیما بر روی باند فرودگاه جریان هوایی در زیر و روی بال هواپیما شکل می گیرد که این جریان هوا به تولید نیروی برا یا همان Lift منجر می شود. نیروی Lift سبب می شود تا هواپیما به پرواز در آید و ما برای درک بهتر این نیروی، آن را در درس های بعدی مورد مطالعه و توضیح قرار میدهیم
الف- موقعیت بال ها نسبت به بدنه هواپیما:
از لحاظ موقعیت بال ها نسبت به بدنه هواپیما سه نوع بال Wing موجود می باشد.
1- بال های که به قسمت بالای بدنه هواپیما متصل می شوند، این نوع بال ها را High Wing می نامند.
2- بال های که به قسمت وسط بدنه هواپیما متصل می شوند. نام این دسته از بال ها Mid Wing است.
3- بال های که به قسمت پایینی بدنه هواپیما متصل می شوند. این نوع بال ها را Low Wing می نامند.
لازم به ذکر است هواپیماهای که دارای یک ست بال می باشند را هواپیماهای Monoplanes می نامند و چنانچه دارای دو ست بال باشند آنها را Biplanes می گویند.
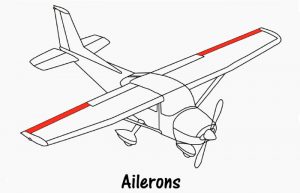
ب- ایلرون ها ( Ailrons )
برای اینکه خلبان بتواند بال ها را در هنگام پرواز کنترل و هدایت کنید از Ailron ها استفاده می نماید. این دو قطعه متحرک در قسمت لبه فرار بال ( Trailing Edge or Rear ) و در نزدیکی لبه بال به سمت خارج هواپیما متصل می باشند. Ailron ها توسط اهرم کنترل که در دست خلبان می باشد حرکت می کنند. لازم به ذکر است که Ailron ها بر خلاف حرکت یکدیگر حرکت می کند. به طور مثال چنانچه Ailron سمت راستی به سمت بالا حرکت کند Ailron سمت چپ به طرف پایین حرکت می کند. این موضوع به خلبان اجازه می دهد تا هواپیما را در حول محور افقی هدایت نمایید که این موضوع را در درس های بعدی به طور مفصل توضیح خواهیم داد. در این درس فقط این را به خاطر بسپارید که Ailron یک قسمت از بال هواپیما می باشد که قابلیت کنترل به بال ها را می دهد.
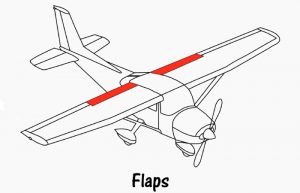
پ- فلپ ها ( Flaps ).
فلاپ ها را می توان امروزه برروی بال اکثر هواپیماها مشاهده کرد.اثر افزودن فلاپ به لبه فرار بال معادل افزایشcamberبال است.بعضی از فلاپ ها نیز طول وتر بال را افزایش می دهنداین امر باعث افزایش مساحت بال و در نتیجه باعث کاهش زاویه ی حمله مورد نیاز برای تولید نیروی برا می شود.بازنمودن فلاپ هاتاحدود 20درجهدرسرعت های پایین باعث افزایش نیروی برا,بدون افزایش زیاد نیروی پسا می شود.بسیاری از هواپیماها فلاپ هایشانراحدود10تا20درجه به منظور کاهش طول باندخزش,پایین می آورند.وقتی فلاپها بیش از20درجه پایین می آیند,پسا بسرعت افزایش می یابد,به طوری که باافزایش نرخ کاهش ارتفاع میشود که در حین تقرب برای فرود مناسب است.فلاپ ها را ابزار کنترل ثانویه secondary control device ویاابزار افزایش براHigh Lift device می گویند.همانطوریکه اشاره گردید باتوجه به شرایط پروازی نقش فلاپ هم افزایش نیروی برا و هم افزایش نیروی پسا می باشدواین نقش عمدتا درشرایط نشست و برخاست بیشتر قابل توجه خواهد بود.
از تاثیرات عمده فلاپ برروی بال می توان به موارد زیر اشاره نمود:
1-افزایش ضریب نیروی برا دربال
2-کاهش زاویه واماندگی بال
3-کاهش سرعت واماندگی
به طور کلی فلاپ ها در دو موقعیت نصب می شوند:
1-فلاپ های نصب شده برروی لبه ی حمل بار
2-فلاپ های نصب شده برروی لبه فراربال
انواع فلاپ لبه فرار
1-فلاپ ساده plain flap-simple flap-hinged flap
2-فلاپ جداشونده یا شکستهsplit flap
3-فلاپ زپ zap flap
4-فلاپ فاولر fowler flap
5-فلاپ شکافدار slotted flap
3- قسمت انتهای یا همان دم هواپیما ( Empennage )
به کل قسمت انتهای هواپیما Empennage میگویند که می توانید در تصویر زیر آنرا مشاهده نمایید.
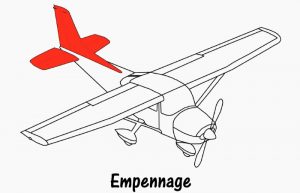
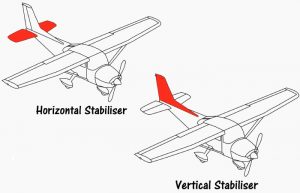
Empennage از دو قسمت پایدار کننده عمودی ( Vertical Stabilizer or Fin ) و پایدار کننده افقی ( Horizontal Stabilizer ) تشکیل شده است. همه ما با دارت بازی کرده ایم و پره های در انتهای دارت دیده ایم. پره های انتهای دارت باعث می شود که دارت در زمان پرتاب پایدار باشد و ناگهان تغییر میسر ندهد. Vertical Stabilizer و Horizontal Stabilizer در هواپیما نقش پایدار کننده هواپیما را همانند پره های دارت بازی می کنند. به زبان ساده هواپیما در هنگام پرواز و در یک مسیر مشخص ناگهان تغییر مسیر نمی دهد چراکه هواپیما دارای Vertical Stabilizer و Horizontal Stabilizer می باشد.
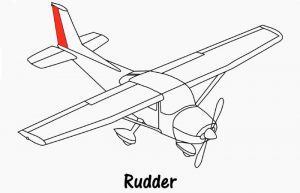
الف- رادر و الویتور ( Ruddr and Elevator )
رادر ( Rudder ) در قسمت انتهایی پایدار کننده عمودی ( Vertical Stabilizer ) متصل شده است. Rudder توسط 2 پدالی که زیر پایین خلبان وجود دارند کنترل می شود. این قسمت بر خلاف Vertical Stabilizer ثابت نیست و متحرک می باشد. لازم به ذکر است که Rudder به خلبان این امکان را می دهد که دماغه هواپیما را در زمان پرواز به سمت چپ و یا راست متمایل نماید. همچنین در هنگام دور زدن هواپیما، از Rudder و Ailron ها به صورت ترکیبی استفاده می شود تا هواپیما بتواند یک دور بدون مشکل را تجربه کند. ( در درس مربوط توضیحات تکمیلی ارائه خواهد شد )
در این درس فقط بدانید که رادر در قسمت Empennage می باشد و به Vertical Stabilizer متصل است و به خلبان اجازه می دهد تا دماغه هواپیما را به راست و چپ متمایل کند. چگونگی استفاده از رادر و توضیحات تکمیلی را در درس مربوط به Rudder با هم بررسی و مورد مطالعه قرار می دهیم.
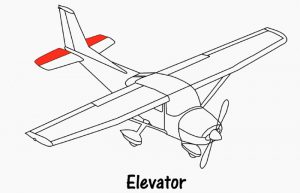
لویتور ( Elevator ) به انتهای قسمت پایدار کننده افقی ( Horizontal Stabilizer ) متصل شده است و این قسمت بر خلاف پایدار کننده افقی ثابت نیست و دارای حرکت می باشد. الویتور توسط اهرم کنترل که در دست خلبان است کنترل می شود و به خلبان این امکان را می دهد که دماغه هواپیما را به سمت بالا و پایین حرکت دهد. ( توضیحات تکمیلی و بررسی کامل الویتور را در درس مربوطه ارائه خواهیم داد )
– ارابه فرود ( Landing Gear )
بطور کلی ارابه فرود در هواپیمادارای چند وظیفه اصلی می باشد این وظایف بطور خلاصه عبارتنداز:
1-هواپیمارا برروی زمین در حالت پایدار نگه می دارد ومانع از تماس و صدمه دیدن بال و بدنه می شود
2-نقش شاسی گردان را برای هواپیما ایفامی نماید تاهواپیما بتواند روی زمین حرکت و یا بارگیری نماید
3-درهنگام فرود ضربات را جذب می کند
4-قبل از برخاستن هواپیما از روی زمین امکان سرعت را فراهم می نماید
باتوجه به وظایف اشاره شده در خصوص ارابه فرود اعتقاد براین است که این سامانه در هنگام پرواز هیچ نقشی را برعهده ندارد وبنابراین برای کاهش تبعات منفی آن ازجمله ایجاد پسا بهتراست این سامانه به نوعی درداخل بال و یا بدنه هواپیما جمع شوند.باتوجه به تنوع موجود درطراحی وساخت ارابه های فرود و تعداد چرخهای نصب شده و حتی چیدمان متنوع چرخها – بطور کلی ارابه های فرود به6نوع تقسیم بندی می شوند:
1-یک چرخ اصلی و یک چرخ کوچک Single Main
2- چرخ دم Tail Gear
3-چهار چرخ Quadricycle
4-دوچرخ اصلی و دو چرخ کوچک Bicycle
5-سه چرخ (چرخ زیر دماغه هواپیما) Nose Gear-Tricycle
6-چند چرخه Multi-Bogie
باتوجه به اینکه امروزه همه هواپیماهای مسافربری و نظامی دارای ارابه های فرود جمع شونده هستند ولی بطور کلی ارابه های فرود را به دو نوع تقسیم بندی نموده اند:
1-ارابه های فرود ثابت
2-ارابه های فرود جمع شونده
درهواپیماهایی که آب نشین هستند و یا به عبارتی از روی آب پرواز نموده وبرروی آب فرود می آیند از ارابه فرود مخصوصی که باتوجه به نوع ماموریت هواپیما طراحی و ساخته شده است استفاده می گردد تا شرایط سرخوردن هواپیما را برروی آب فراهم آورد به این نوع ارابه ی فرود وسیله سرش یاSkidمی گویند.

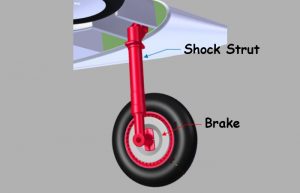
5- ضربه گیرها ( Shock Struts )
همه ما میدانیم که ماشین فنر و کمک فنر دارد. هدف از طراحی فنر و کمک فنر برای ماشین جذب نیروی وارد شده از طرف زمین و دست اندازها است تا ماشین در طولانی مدت دچار خسارت نشود. هواپیماها هم مثل ماشین ها از ضربه گیر استفاده می کنند تا در زمان حرکت بر روی زمین و در زمان فرود در اثر نیروی وارد شده به بدنه، هواپیما آسیب نبیند. در هوانوردی و خلبانی این ضربه گیرها با نام Shock Struts شناخته می شوند.
6- ترمز ( Brakes )
ترمز یا همان Brake هواپیما تقریبا مثل ساختار ترمز در اتومبیل است اما اندک تفاوتی دارد. در هواپیماها معمولا Brake ها بر روی دو چرخ اصلی یا همان Main Wheels نصب می شوند. همانطور که می دانید در اتومبیل ترمز توسط یک پدال اعمال می شود اما معمولا در هواپیماها ترمز توسط دو پدال اعمال می شود. یعنی شما به میزان دلخواه می توانید به چرخ سمت راست و چرخ سمت چپ به صورت مجزا ترمز اعمال نمایید که این سیستم به Differential Braking معروف است.
هواپیماهای که دارای سیستم ترمز Differential Braking هستند بر روی باند فرودگاه یا رمپ فرودگاه بهتر می توانند دور بزنند چراکه شما می توانید به یک چرخ ترمز کامل اعمال کنید در صورتی که چرخ دیگر کاملا آزاد است و می تواند به راحتی حرکت کند.
به طور مثال اگر هواپیمای شما دارای سیستم Differential Braking باشد و شما بخواهید به سمت راست یک گردش عمیق بزنید می توانید با اعمال ترمز به چرخ سمت راست مانع از حرکت آن شوید در حالی که چرخ سمت چپی آزاد است و به راحتی می تواند حرکت کند. این موضوع سبب می شود تا هواپیمای شما به صورت عمیق و راحت به سمت راست گردش نمایید.
7- پاور پلنت ( Power Plant )
در هواپیماهای کوچک پاور پلنت ( Power Plant ) عبارت است از موتور ( Engine ) و ملخ هواپیما ( Propeller )
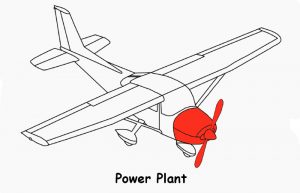
الف- موتور هواپیما ( Engine )
وظیفه اصلی موتور هواپیما تامین نیرو برای به گردش در آوردن Propeller می باشد. از دیگر وظایف موتور هواپیما تولید نیروی الکتریکی، نیروی مکش ( vacuum Source ) برای ابزار های پروازی و انرژی گرمایشی برای بخاری هواپیما می باشد.
موتور های هواپیما عمدتا به دوگروه اصلی موتورهای پیستونی Reciprocating Engineوموتورهای توربینی یاجت jet Engineتقسیم بندی می شوند.موتور های پیستونی ملزم به استفاده ازملخ می باشند.
موتورهای توربینی یا جت بطور کلی به 4نوع اصلی تقسیم بندی می شوند:
1-موتورهای توربوپراب یا جت ملخدار
2-موتورهای توربوجت
3-موتورهای توربوفن
4-موتورهای توربوشفت
اتصال موتور به سازه و فرآیند نصب موتور به طراحی نحوه نصب موتور وابسته است بطوریکه باعث کاهش قدرت موتور نگردد و درضمن حداقل پسا و حداقل اضافه وزن را داشته باشد.طراحی نسب موتور اثرات زیادی بر متغیر های مختلف از جمله ایمنی-وزن-سازه-پسا-کنترل-حداکثر برا- راندمان نیروی محرکه-قابلیت تعمیر –مقدار اضافه وزن وسرصدا و ارتعاشات دارد.درهواپیماهای چند موتوره ملخدار,موتورهارا معمولا در ابتدای بال ودرمورد هواپیماهای تک موتوره ملخدار,اغلب موتور را در داخل دماغه هواپیما قرار می دهند.بنابراین در هواپیماهای چندموتوره توربوپراپ معمولا موتورها را داخل بال نصب می کنند.درهواپیماهای جت نصب موتور کمی پیچیده تراست و معمولا موتور را داخل یا بالای بال,داخل بدنه و یا پایین بال به وسیله pylonیاStrut نصب می نمایند.
بطور کلی موتورهای هواپیما می تواند درمحلهای زیر طراحی و نصب گرد:
1-داخل بدنه جلو-وسط وعقب
2-کناربدنه
3-بالای بدنه
4-زیرو روی ابتدای بال
5-داخل سکان عمودی
6-زیربدنه
7-داخل بال(ریشه بال)
نکات مثبت و منفی طراحی نصب موتور درداخل ریشه بال
– نکات مثبت
1-کاهش پسا
2-کاهش وزن
3-کاهش گشتاور گردشی حول محور عمودی درصورت Failشدن یک موتور
– نکات منفی
1-احتمال وجود خطر برای سازه بال
2-وارد شدن ضربات سخت به تیرک اصلی بالSpar,درصورت شکست دیسک و یا پره های موتور
3-وجود مشکل در بهینه نمودن ورودی های هوا
4-دسترسی مشکل به موتورها ودرنتیجه قابلیت تعمیرات کم
5-عدم امکان قرار گرفتن Flap
نکات مثبت و منفی طراحی نصب موتور در زیر بال
– نکات مثبت
1-ایجاد امنیت بیشتر برای سازه بال
2-دسترسی آسان به موتورها و درنتیجه ایجاد قابلیت تعمیر ونگهداری مطلوب
3-امکان قرار گرفتن Flap در انتهای لبه ی فرار بال نزدیک ریشه ی بال
– نکات منفی
1-فاصله کم موتورها با زمین و امکان کشیده شدن اجسام خارجی به داخل موتورها
2-ایجاد بار بیشتر برروی سازه بال مخصوصا برروی تیرک اصلی بالSpar
3-مشکل تر شدن کنترل سمتی درصورتFail شدن یکی از موتورها
4-قرارگرفتن فلاپ ها درمعرض سرعت زیادی هوای موتورها
5-احتمال وجود خطر برای سازه بدنه
نکات منفی و مثبت طراحی نصب موتور در مجاورت انتهای بدنه
– نکات مثبت
1-کاهش امکان کشیده شدن اجسام خارجی به داخل موتورها
2-عدم استفاده ازpylon
3-کاهش پسا به واسطه عدم استفاده ازpylon
4-کاهش گشتاور گردشی غیرمتقارن Asymmetric Yaw
5-کاهش ارتفاع بدنه و طول شاسی ارابه فرود
– نکات منفی
1-تمایل یافتن مرکز ثقل به سمت عقب به واسطه وزن موتورها
2-طراحی بزرگتر دهنه سکان افقی هواپیما به دلیل جابجایی مرکز ثقل به سمت عقب
3-احتمال وجود خطر برای سازه بدنه
4-پرتاب اجسام خارجی به داخل موتورها توسط چرخهای زیربال
5-در زوایای حمله بالا گردابه های موتور مجموعه دم را می پوشاند و بنابراین امکان واماندگی افزایش خواهد یافت
6-وجود صروصدا و ارتعاش بیشتر در مجاورت بدنه
نتیجه گیری:
با توجه به موارد اشاره شده نتیجه میگیریم که هر محلی در هواپیما برای نصب موتور دارای محاسن و معایبی است به نوعی می توان گفت که تعیین نهایی محل نصب بال در هواپیما با درنظر گرفتن معیارهای طراحی (هزینه-کارایی-و غیره)و همچنین بهینه نمودن و جمع بندی اکثریت نکات مثبت انجام گیرد
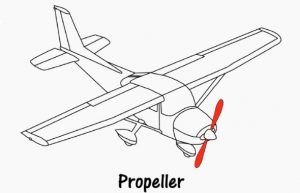
ب- ملخ هواپیما ( Propeller )
Propeller توسط نیروی که موتور هواپیما تامین می کند به گردش در می آید و در اثر این گردش به وجود آمده Propeller نیروی جلو برنده ( Thrust ) را ایجاد می کند که این نیرو به هواپیما اجازه می دهد تا به سمت جلو حرکت کند.
گام ملخ Propeller Pitch
گام ملخ عبارت است از مسافتی که هواپیما درهردور ملخ به جلو می رود به عبارت دیگر می نوان گفت در یک دور گردش کامل ملخ هواپیما به میزان گام تعیین شده در ملخ به جلو حرکت خواهد نمود:
تقسیم بندی ملخ هواپیما از لحاظ گام:
1-ملخ های با گام ثابت Fixed Pitch
2-ملخ ها ی با گام قابل تنظیم Adjustable Pitch
3-ملخ ها ی باگام متغیر Variable Pitch
4-ملخ های با دور ثابت Constant Pitch
نام گذاری قسمت های مختلف ملخ:
1-قسمت مرکزی
2-سوراخ قسمت مرکزی
3-مقر پیچ ها
4-گردن
5-ساقه
6-پره
7-نوک
پ- فایروال ( Firewall )
فایروال قسمتی از پاور پلنت است که موتور هواپیما بر روی آن نصب می شود. از دیگر وظایف فایروال می توان به جدا کردن کابین هواپیما و محافظت خلبانان از قسمت پاور پلنت اشاره نمود.
ج- محافظ موتور ( Cowling )
محافظ موتور، موتور هواپیما را از بارندگی، گرد و غبار و همچنین از کاهش ناگهانی دمای موتور جلوگیری می کند.

تنش های وارد بر هواپیما در حین پرواز Stress:
1-کششی Tension
2-درهم فشردگی Compression
3-خمشی Bending
4-برشی shear
5-پیچشی Torsion
کلام آخر
ما مفتخریم اعلام کنیم که فعالیت های ما تنها محدود به کلاس های علمی و آموزشی نمی باشد .بلکه ما در فونیکس فرصتی را پدید آورده ایم که به کمک آن می توانید در وقت و هزینه خود صرفه جویی کنید و بازدهی را به طور چشمگیر افزایش دهید. زیرا در جامعه امروزی که نیاز ها تغییر کرده اند.
راه حل های قدیمی جوابگوی مشکلات جدید ما نیستند و ما قادر خواهیم بود. با دانش و تخصص خود بهترین راه حل را برای شما به ارمغان آوریم با ارائه ی فعالیتهای صنعتی شرکت فونیکس ساخت و تولید انواع پهپاد و هواپیمای بدون سرنشین خدمات پس از فروش تعمیرات ، آموزش پرسنل و … در خدمت شماست.
همچنین با طراحی دلخواه شما در زمینه های صنعتی و تفریحی به صورت اختصاصی
(طراحی انواع هواپیما ،بالن و …)شما را همراهی می نمائیم.
نقش پهپاد ها در طیف سنجی و سنجش از دور
امکانات کشاورزی دقیق و نقشه برداری حرارتی
وسایل نقلیه هوایی بدون سرنشین کوچک (پهپادها) در ترکیب با دوربین های کم هزینه و سبک وزن RGB به یک ابزار استاندارد برای انجام وظایف فتوگرامتری بدل شده است. با وجود آنکه سنجنده های چند طیفی و حرارتی پتانسیل های خود را تقریباً یک دهه پیش نشان داده اند، تا چندی پیش برای سکوهای کوچک پهپادی بسیار سنگین و حجیم بودند. امروزه، سنجنده های حرارتی و چندطیفی مناسب برای بکارگیری روی پهپادهای کوچک، بطور تجاری در دسترس هستند. به خواندن ادامه دهید تا در ارتباط با قابلیت های آنها برای بکارگیری در کشاورزی دقیق و نقشه برداری حرارتی بیشتر بدانید.
(نوشته شده توسط Stephan Nebiker و Natalie Lack، سوییس)
در بررسی عملکردی نویسنده، دوربین های چندطیفی و سنجنده های مادون قرمز حرارتی (TIR) روی یک پهپاد eBee تولید شده توسط senseFly سوار شدند. شرکت senseFly که در سال ۲۰۰۹ تاسیس شده و در لوزان سوئیس واقع شده است، پهپادهای بال ثابت را تولید نموده و آنها را با دوربین های سفارشی شده سبک وزن تولید شده توسط Airinov که یک شرکت فرانسوی است، تجهیز کرده اند. با تمرکز بر کشاورزی دقیق، Airinov دوربین های Canon را به سنجنده های چندطیفی تبدیل کرده و دوربین چند طیفی multiSPEC 4C و سنجنده مادون قرمز حرارتی thermoMAP را تولید نموده اند. این مطالعه به بررسی Canon S110 NIR و یک نسخه اولیه از multiSPEC 4C که هردو دوربین های چندطیفی هستند، و thermoMAP به عنوان یک سنجنده TIR پرداخته است.
پهپادها و سنجنده ها
پهپاد بال ثابت سبک وزن eBee که می تواند بصورت کاملاً خودکار عمل کند، به ندرت به مهارت های راهبری نیاز دارد و برای پوشش مناطق بسیار بزرگ ایده آل است. خانواده eBee در کنار سنجنده های سفارشی شده ای که می توانند از طریق راهبر خودکار پهپاد بال ثابت هدایت شوند، به بازار عرضه شده است. Canon S110 RGB یک دوربین رنگی ارزان قیمت است، Canon S110 NIR و S110 RE دوربین های چند طیفی کم هزینه ای هستند، در حالیکه multiSPEC 4C یک سامانه گران قیمت است. دوربین های چند طیفی Canon با فیلترهای رنگی Bayer اصلاح شده مجهز شده اند و به جای ثبت آبی، سبز و قرمز، باندهای سبز (G)، قرمز (R) و مادون قرمز (NIR) اخذ می شوند. تنها یک عدسی مورد نیاز است و منجر به ثبت دقیق کانال های طیفی با حساسیت های طیفی هم پوشان می شود (شکل ۱).
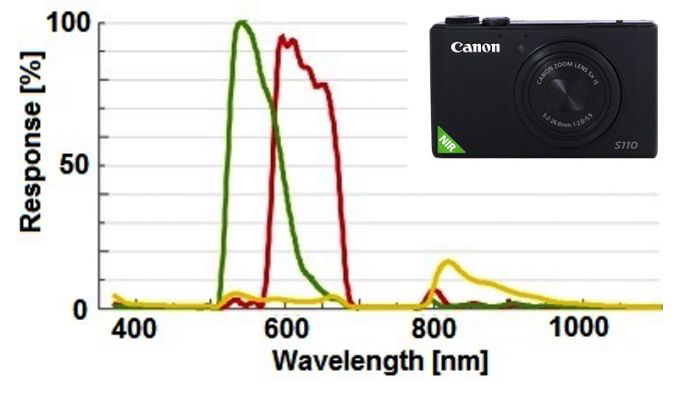
![]()
شکل ۱- حساسیت طیفی Canon S110 NIR نرمال شده نسبت به باند سبز (۱۰۰%)
در مقابل، multiSPEC 4C چهار عدسی و چهار سنجنده CCD تک رنگ دارد، جداسازی رنگ ها در واحدهای اپتیکی و از طریق فیلترهای تداخل سنجی باندگذر با فرکانس های مرکزی به خوبی تعریف شده و عرض باندها انجام می شود (شکل ۲). یک سنجنده تک رنگ در راستای زنیت امکان نرمال سازی تصاویر را فراهم می سازد. جدول ۱ جزئیات سنجنده های اشاره شده در فوق را ارائه می کند.
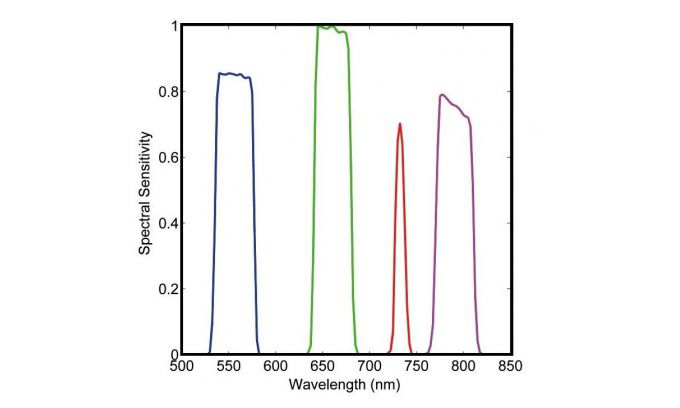
![]()
شکل ۲- حساسیت طیفی multiSPEC 4C نرمال شده نسبت به باند سبز (۱۰۰%)
| thermoMAP | multiSPEC 4C تجاری | multiSPEC 4C نمونه اولیه | Canon S110 NIR | سنجنده |
| مشخصات | ||||
۰٫۳ مگاپیکسل ۵۱۲*۶۴۰ | ۴ سنجنده ۱٫۲ مگاپیکسلی | ۴ سنجنده ۰٫۴ مگاپیکسلی | ۱۲ مگا پیکسل الگوی Bayer | پیکسل در هر سنجنده |
| ۸٫۷*۱۰٫۸۸ | ۳٫۶*۴٫۸ هر سنجنده | ۲٫۸۸*۴٫۵۱ هر سنجنده | ۵٫۵۸*۷٫۴۴ | اندازه سنجنده (میلیمتر) |
| ۱۷ | ۳٫۷۵ | ۱٫۳۳ | اندازه پیکسل (میکرومتر) | |
| ۱۸٫۵ سانتیمتر | ۱۰ سانتیمتر | ۲۰ سانتیمتر | ۳٫۵ سانتیمتر | فاصله نمونه برداری زمینی در ارتفاع پرواز ۱۰۰ متری |
| ۷۰۰۰ – ۱۶۰۰۰ | G (550±۲۰) R (660±۲۰) RE (735±۵) NIR (790±۲۰) | G (550) R (625) NIR (850) | کانال های طیفی (فرکانس مرکزی/اپتیکی. عرض باند) (نانومتر) | |
| ۱۰۰۰۰ | ۸۰۰۰ | نمونه اولیه | ۹۰۰ | قیمت تقریبی (یورو) |
جدول ۱- ویژگی های اصلی سنجنده های مورد بررسی قرار گرفته
آزمایشات میدانی
آزمایشات میدانی در مرکز کشاورزی Liebegg در سوئیس و با محصولات مختلف کشاورزی از طریق Canon S110 NIR و multiSPEC 4C انجام شدند. پروازهایی با هدف تعیین زمان بهینه برداشت محصول و برآوردهای بازده محصولات مربوط به گونه ها و روش های درمانی، بر فراز مزارع دانه های روغنی انجام گرفت. داده های چندین مزرعه دیگر نیز برای مطالعه دومی اخذ شدند، این مزارع عبارتند از:
- یک مزرعه گندم با استراتژی های کود دهی متفاوت
- یک مزرعه چغندر قند با پتانسیل حمله آفات
- یک مزرعه سیب زمینی با هدف تعیین زمان بهینه برای خشکانیدن محصول و پایش آفات سیب زمینی، یک بیماری ویرانگر که موجب قحطی سیب زمینی ایرلندی در میانه قرن نوزدهم شد.
در هر مزرعه، سه تا هفت نقطه کنترل زمینی با دقت مسطحاتی و ارتفاعی ۲ سانتیمتری استقرار یافتند.
داده ها
در مجموع ۲۴ پرواز به انجام رسید، هریک بین ۲۰ تا ۴۰ دقیقه زمان بردند، و ۴۰ تا ۹۰۰ تصویر را اخذ نموند، هریک فاصله نمونه برداری زمینی ۲٫۵ تا ۱۰ سانتیمتر داشتند. نمونه اولیه multiSPEC 4C برخی محدودیت ها را در نتیجه ابعاد کاهش یافته سنجنده و قدرت تفکیک و توان مصرفی بالای خود نشان می دهد. پردازش تصاویر با نرم افزار استاندارد Postflight Terra 3D انجام شد و شامل مراحل زیر بود:
- توجیه تصویر/ سرشکنی دسته بلوک
- تولید یک مدل سطحی رقومی (DSM) به وسیله انطباق تصویری متراکم
- تولید تصاویر قائم و موزائیک نمودن آنها
- محاسبات نقشه های بازتابی و شاخص های گیاهی
پردازش داده های multiSPEC از طریق کالیبراسیون رادیومتریکی کانال های منفرد و با استفاده از تصاویر از یک جدول کالیبراسیون انجام می شود. دقت توجیه تصویر ۰٫۳-۰٫۲ پیکسل، معادل ۴-۱٫۵ سانتیمتر در فضای عارضه است.
نتایج
تصاویر multiSPEC و Canon S110 NIR با داده های اخذ شده توسط یک طیف سنج زمینی قابل حمل کالیبره شده که دامنه ۳۶۰ تا ۱۰۰۰ نانومتری را با قدرت تفکیک طیفی ۳٫۳ نانومتر ثبت نموده و یک کانال مبنای رو به زنیت را نشان می دهد، مقایسه شدند. از آنجایی که شاخص تفاضل گیاهی نرمال شده (NDVI) بر مبنای نسبت های بازتابی است، نیازی به مقادیر بازتابی نرمال شده و یا کالیبره شده نخواهیم داشت. دامنه تغییرات NDVI بین ۱- تا ۱ است. بطور متوسط مقادیر NDVI از سنجنده multiSPEC 4C انحرافی برابر با ۰٫۰۴- از مقادیر مبنا دارند. برای سنجنده S110 NIR متوسط اختلاف برابر با ۰٫۲۶۰- است. این مقدار بزرگ در نتیجه همپوشانی کانال های طیفی پدید آمده است.
حیات گیاهان و برآورد پتانسیل بازده محصولات بر مبنای مقادیر NDVI مزرعه دانه های روغنی تحت آزمایش مورد ارزیابی قرار گرفت. اگرچه مجموعه پروازها در نتیجه شرایط بد آب و هوایی در تابستان ۲۰۱۴ با تاخیر مواجه شده و تنها چند روز پیش از برداشت محصول امکان انجام آنها فراهم شد، تفاوت بارزی میان سرزندگی گونه های متفاوت و در میان مناطق سم پاشی شده و نواحی بدون هرگونه اقدام درمانی، قابل تشخیص است (شکل ۳). سم پاشی موجب افزایش مدت زمان فعالیت گیاه تا زمان برداشت محصول می شود. ضریب همبستگی نرمال شده بین بازده محصولات و مقادیر NDVI برای مناطق سم پاشی شده، ۰٫۷۸ برآورد گردید. برای مناطق سم پاشی نشده این ضریب مقداری برابر با ۰٫۳۵ داشت.
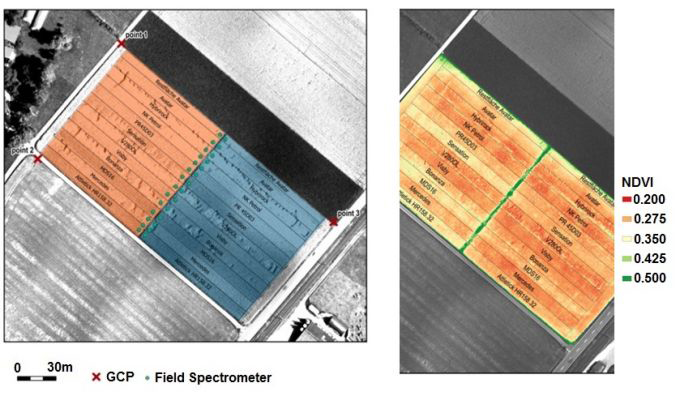
![]()
شکل ۳- مزرعه آزمایشی دانه های روغنی (چپ) سم پاشی شده (نارنجی) و بدون هرگونه اقدام درمانی (آبی) و نقشه NDVI استخراج شده از داده های multiSPEC 4C، فاصله نمونه برداری زمینی ۱۰ سانتیمتری
سنجنده TIR
برای تعیین قابلیت های سنجنده thermoMAP، دو مجموعه پرواز در ۱۳ مارس ۲۰۱۵، بلافاصله پیش و پس از طلوع آفتاب انجام گردید. تصاویر با فواصل نمونه برداری زمینی ۱۵ و ۳۰ سانتیمتری اخذ شدند. به منظور ایجاد یک DSM از منطقه با استفاده از انطباق تصویری متراکم، تصاویر RGB دارای همپوشانی در طول روز با یک دوربین Canon S110 RGB با فاصله نمونه برداری زمینی ۵ سانتیمتری اخذ شدند. داده ها برای بدست آوردن تصاویر قائم TIR با یک فاصله نمونه برداری زمینی ۱۵ سانتیمتری، یک تصویر قائم TIR شارپ شده با باند پان، با بکارگیری تصاویر RGB برای عملیات شارپ نمودن که منجر به یک فاصله نمونه برداری زمینی ۵ سانتیمتری می شود، و یک DSM همپوشان شده با ارتوموزائیک TIR که منتج به یک نمای سقفی سه بعدی می شود، پردازش شدند (شکل ۴). در طول این آزمایشات، thermoMAP مشکلات سخت افزاری را از خود بروز داد که از تبدیل مقادیر اندازه گیری شده به دماهای سطحی جلوگیری نمود. اگرچه، این داده ها اطلاعات ارزشمندی را برای متخصصان حوزه انرژی ساختمان پدید می آورد.
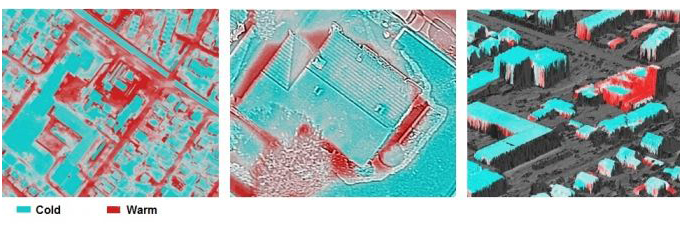
![]()
شکل ۴- تصویر قائم TIR با یک فاصله نمونه برداری زمینی ۱۵ سانتیمتری (چپ)، تصویر قائم TIR شارپ شده با باند پان با یک فاصله نمونه برداری زمینی ۵ سانتیمتری (وسط) و نمای سقفی سه بعدی
نتایج
اندازه گیری های با کیفیت بالا، و نوردهی بدون توجه از طریق سنجنده های چندطیفی گران قیمت، آنها را برای پایش گیاهان در طول زمان و بدون نیاز به جمع آوری داده های مبنای طیف سنجی با زحمت فراوان در مزرعه، مناسب می سازد. سنجنده های چندطیفی ارزان قیمت، در ترکیب با یک فاصله نمونه برداری زمینی مناسب (تا سطح سانتیمتر) برای پایش تغییرات زمینی و شناسایی بیماری های گیاهان در به عنوان مثال یک محصول خاص گران قیمت، بسیار مناسب است.
کلام آخر
ما مفتخریم اعلام کنیم که فعالیت های ما تنها محدود به کلاس های علمی و آموزشی نمی باشد .بلکه ما در فونیکس فرصتی را پدید آورده ایم که به کمک آن می توانید در وقت و هزینه خود صرفه جویی کنید و بازدهی را به طور چشمگیر افزایش دهید. زیرا در جامعه امروزی که نیاز ها تغییر کرده اند.
راه حل های قدیمی جوابگوی مشکلات جدید ما نیستند و ما قادر خواهیم بود. با دانش و تخصص خود بهترین راه حل را برای شما به ارمغان آوریم با ارائه ی فعالیتهای صنعتی شرکت فونیکس ساخت و تولید انواع پهپاد و هواپیمای بدون سرنشین خدمات پس از فروش تعمیرات ، آموزش پرسنل و … در خدمت شماست.
همچنین با طراحی دلخواه شما در زمینه های صنعتی و تفریحی به صورت اختصاصی
(طراحی انواع هواپیما ،بالن و …)شما را همراهی می نمائیم.
کاربرد پهپاد 2
بی شک با پیشرفت تکنولوژی و پیچیده تر شدن صنایع، احتمال وقوع حوادث و آتش سوزیهای عظیم دور از انتظار نیست. یکی از دغدغههای دائمی مدیران عملیاتی در کنترل صحنه حادثه و فرماندهی عملیات اطفاء حریقهای گسترده، کسب اطلاعات دقیق و لحظه به لحظه از رفتار و وسعت حریق و حوادث و موقعیت نیروهای آتش نشان و واکنش در صحنه عملیات میباشد. که این موضوع اغلب به دلیل وسعت حریق و حوادث معمولا با دشواری همراه است. از سوی دیگر در حوادث حریق مخازن سوخت، کالاهای خطرناک، آتش سوزی کشتیها حساسیت و خطر پذیری بالای نیروهای مقابله در مجاورت و درگیر با اینگونه حوادث همواره مورد توجه بوده است.
امروزه پیشرفتهای حیرت انگیزی در ساخت پهپادها (پرندههای هدایت پذیر از دور) و کاربرد آنها جایگاه ویژهای به این تکنولوژی بخشیده است. با توجه به کاربردهای مفید این پهپادها در رفع نیازهای مختلف بشر، روز به روز بر اهمیت این ابزار افزوده میشود. شرکتهای بسیاری در حال توسعهی مدلهای مختلف پهپادها هستند. تا از این طریق کاربردهای آن را در زندگی انسانها افزایش دهند.

با بررسی آمار و ارقام سالیانه در رابطه با حوادث و حریقهای به وقوع پیوسته در بندر و نیز خسارات مالی و جانی آنها، ضرورت نگاهی ویژه و خاص به مقوله حریق و حوادث بیش از پیش مشخص میگردد. در این میان مهمترین فاکتور و مسئله در کاهش اثرات حریق و حوادث، نقش فرماندهی عملیات اطفای حریق با بکارگیری تکنولوژی نوین پرندههای هدایت پذیر از دور میباشد که در این مقاله بدان پرداخته شده است.
موضوع بکارگیری پرندههای بدون سرنشین در کاربرهای نظامی به سال 1917 میلادی و ارتش ایالات متحده باز میگردد. در این سال چارلز کترینگ، از شرکت جنرال موتورز، هواپیمایی بدون سرنشین دو بالهای برای ارتش آمریکا طراحی کرد که قادر به حمل مهمات و اصابت به هدف بود. در سالهای بعد انگلسیها از هواپیماهای دو باله Fairey Queen که از دور کنترل میشد استفاده کردند. در جنگ جهانی دوم آلمانها از بمبهای پرنده V-1 استفاده کردند که به نوعی سامانههای کروز امروزی محسوب میشود. به مرور زمان و با توسعه علم و فناوری دستاوردهای جدیدی حاصل شده و موجب شده است تا بتوان از پرندههای بدون سرنشین در حوزههای دیگر نیز بهرمند شد.
بطور کلی پرندههای بدون سرنشین به 3 نوع تفکیک میشود:
الف) پرنده هدایت پذیر از دور: نوعی از هواپیماهای بدون سرنشین که به پهپاد شهرت دارند. که از حروف اول عبارت پرنده هدایت پذیر از دور گرفته شده است.
ب) اشیاء پرنده هدایت پذیر از دور یا هواگرد هدایت پذیر از دور که عموما شامل رتورهای4،6 و8 ملخه میشود.
ج) پرنده بدون سرنشین جنگی (نظامی) که پهپاد نظامی نیز گفته میشود.
در هر یک از دسته بندیهای اشاره شده حوزههای مشترک شباهتهایی با سایر دسته بندیها وجود دارد. اما به طور کلی میتوان گفت دسته سوم عموما کاربرد نظامی داشته و سایر دستهها از کاربردهای غیر نظامی در علوم و فناوری برخوردار هستند. که در این مقاله به پرندههای هدایت پذیر از دور با کارکردهای غیر نظامی که عموما بنام پهپاد شناخته شده است. پرداخته میشود[1].
امروزه پهپادها ضمن حفظ در توسعه کارکردهای نظامی در سایر عرصههای علم و فن آوری رواج بسیار یافتهاند. پیشرفت تکنولوژی در حوزه الکترونیک و رباتیک این امکان را میسر نموده است. که شاهد کوچکتر شدن این گونه پهپادها هستیم. از طرفی استفاده از مواد کامپوزیتی باعث پایین نگه داشتن وزن کلی پهپادها شده است. که چابکی بیشتر این پرندهها را در پی داشته است.
یک از کاربردهای فوق العاده موثر این پهپادها که مورد توجه قرار گرفته است. استفاده از آن در حوادث و عملیاتهای آتش نشانی و امداد و نجات میباشد. پهپادها نقش مهم و تاثیرگذاری در خاموش کردن آتشسوزیها و جایی که پرواز برای خلبان خطر دارد، ایفا میکنند. به عنوان نمونه به حادثه فوکوشیمای ژاپن که از پهپادها برای بررسی آسیبهای وارده به این نیروگاه استفاده شد اشاره نمود. همچنین استفاده از پهپاد در مبارزه با آتش در سال 2007 میلادی که در این سال حریق گستردهای جنگلهای اطراف دریاچه آروهد کالیفرنیا را در بر گرفت و هواپیمای بی سرنشینی بر فراز آن به پرواز در آمد. ناسا از این پهپاد برای ثبت اطلاعات گستردگی و میزان خسارت حریق جنگلی استفاده کرد. این مقاله نیز بر این است تا کاربرد پهپادها در حریق و حوادث بندر شهید رجایی را بررسی نماید.
به گزارش شفاف، در اوایل دوره ی ظهور پهپادها مهندسان همواره به فکر به کارگیری آن در امر امداد و نجات بوده اند و در همان دوره به موفقیت هایی نیز دست پیدا کردند، قابلیت حمل اجسام به واسطه کوادروتورها این امکان را فراهم ساخت تا در شرایط بحرانی و عدم دسترسی به افراد نیازمند، لوازم ضروری و کمک های اولیه را در دسترس آنها قرار دهیم. برای مثال فرض کنید گروهی آسیب دیده در برف زمینگیر شدهاند و می توانیم قبل از رسیدن نیروهای امدادی آب، مواد غذایی و دارو را در کمترین زمان در اختیار آنها قرار دهیم. مورد اشاره شده را می توان اولین استفاده این فناورری در امداد نجات نام برد.
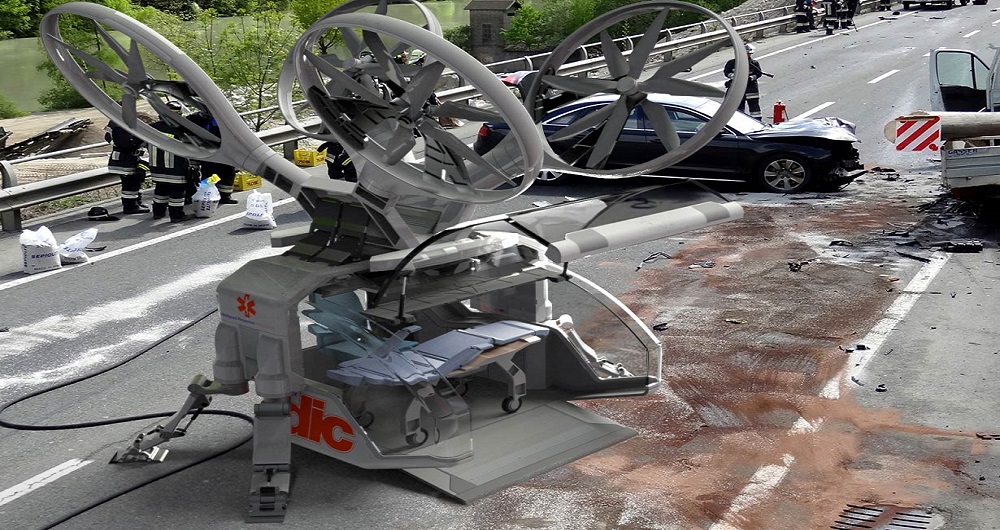
طرح آمبولانس هوایی فعلا در حد یک طراحی مفهومی بوده است و به برنامه ی ساخت و تجاری سازی آن اشاره نشده است. اما با توجه به پیشترفت عرصه بدون سرنیشن ها و ساخت تاکسی های هوایی مانند EHANG 184 پتانسیل ساخت و کاربردی شدن آن وجود دارد و باید دید کمپانی خاطی تا چه حد در اجرای ایده ی خود مصمم است.

به هر حال موفقیت یا عدم موفقیت DP-14 این باور را به وجود آورد که می توان از دِرون ها در نقش آمبولانس های هوایی استفاده کرد. در جدیدترین طرح مفهمومی از آمبولانس هوایی شاهد یک کوادکوپتر هستیم که قابلیت هدایت از طریق GPS و خلبان یا ترکیبی از هردو را دارد. این پرنده به گونه ای طراحی شده است تا بتواند در کمترین فضاها فرود خود را انجام دهد و در سریعترین زمان ممکن فرایند انتقال مصدوم را انجام دهد. شرکت طراح، این ادعا را دارد که با وجود اینکه ساخت محصولشان هزینه ی میلیون دلاری دارد اما باز چندین برابر از هلیکوپترهای اورژانس ارزان تر تمام می شود.

بعد از گذشت مدتی و با پیشترفت سیستم های کنترلی پهپادها، شاهد محصول کمپانی DPI بودیم. این هواپیمای بدون سرنشین که DP-14 نام دارد که قابلیت حمل ۲۰۰ کیلوگرم وزن را به مدت دو ساعت دارد و این بازه ی زمانی در حالت بارگذاری کمتر و سوخت بیشتر افزایش پیدا خواهد کرد. سیستم کنترل خودکار این پرنده از الگوریتم های پیچیده ای برای هدایت این پرنده استفاده می کند و این موضوع کار را برای خلبان آن راحت می کند به طوری که یک شخص همزمان می تواند چندین پهپاد را کنترل کند. این پهپاد که بیشتر با رویکردی نظامی ساخته شده است این امکان را دارد تا مصدوم در فضای داخلی پرنده قرار گیرد و در کمترین زمان ممکن به مراکز درمانی منتقل شود.

استفاده از پهپادها که به عنوان پرندههای بدون سرنشین برای تحویل کالاهای سفارش شده به مشتری به تازگی آغاز شده است، به طور قطع تأثیر شگرفی در آینده خواهد داشت اما محققان به تازگی اعلام کردهاند که پهپادهای تحویلدهنده کالا در کاهش آلودگی هوا نیز تأثیرگذار است.

به گزارش گروه علم و فناوری آنا به نقل از گیزمگ، محققان معتقدند که رباتهای پرنده بدون سرنشین که به عنوان تحویلدهنده کالا مورد استفاده قرار میدهند، میتوانند در مسافتهای کوتاه جایگزین کامیونهای باربر شوند که نقش مهمی در آلودگی هوا دارند.
استفاده از پهپادهای تحویلدهنده کالا به جای کامیونهای حمل بار سهم زیادی میتوانند در کاهش انتشار کربن در هوا داشته باشند. محققان دانشگاه واشنگتن برای اندازهگیری میزان انتشار کربن ناشی از پرواز پهپادها و مقایسه آن با حرکت کامیونهای باربر در شهر از مدلهای اولیه تخمین انتشار کربن کامیونها بهره بردهاند که از آن برای برآورد اثرات محیطزیستی سرویسهای تحویل بار فروشگاهها استفاده میکنند.
آنها سپس میزان انرژی مورد نیاز پهپادها را به ازای وات- ساعت در هر مایل و براساس ۱۰ فرض ظرفیت بار متفاوت آنها محاسبه کردند و فرض را بر این گذاشتند که بعد از هر بار تحویل بسته، باید برای بارگیری مجدد به انبار مرکزی برگردند. مدل تحقیقاتی محققان، ۳۳۰ منطقه خدماترسانی را در لسآنجلس و بیش از ۵۰۰ دریافتکننده کالا را در هر منطقه مدنظر قرار میداد.
دانشمندان طبق این نمونهها دریافتند که پهپادها در صورتی که مسافتهای خیلی طولانی پرواز نکنند، انتشار کربن کمتری نسبت به کامیونها دارند. برای حمل بستههای سبکتر، این وضع بهتر هم میشود و میزان کربن منتشر شده به مراتب پایینتر میآید.
اما با افزایش وزن بسته و به دنبال آن، بالا رفتن میزان انرژی مورد نیاز پهپادها، به نفع کار کامیونها تمام میشود. در نتیجه محققان معتقدند که رقابت پهپادها با کامیونهای حمل بار پیرامون انتشار کربن دشوار است و باید پهپادها را از نظر مصرف انرژی مقرون به صرفهتر کرد. این در حالی است که پهپادها در حمل بارهای سبک و کامیونها در حمل بارهای سنگینتر موفقتر عمل میکنند.
یکی از مزایای کامیونها بر پهپادها حمل بارهای متفاوت از البسه تا دستگاههای سنگین وزن است بنابراین، در مسافتهای طولانی که ایستگاههای زیادی وجود دارد، استفاده از کامیونها بیشتر به نفع محیطزیست تمام میشود. اما در مسافتهای کوتاه که بستههای سبکتر حمل میشود، استفاده از پهپاد مقرون به صرفهتر است.

اهمیت به محصولات کشاورزی و رونق آن یکی از مهم ترین رویکرد های هر کشاورز و هر کشور میباشد. نیاز به یک محصول مطلوب بر هیچ کس پوشیده نیست و خواسته هر فرد در جامعه می باشد. در حوزه کشاورزی از گذشته تا کنون پیشرفت های بسزایی در آلات کشاورزی و کیفیت مطلوب محصولات را مشاهده نمودیم از جمله مکانیزه شدن ادوات و فاصله گرفتن از کشاورزی سنتی باعث افزایش محصولات و کیفت آن شده است و دنیای کشاورزی به دنیای بزرگتری از صنعت مواد غذایی پا گذاشت و همچنین باتوجه به افزایش رشد جمعیت و برآورده کردن تقاضای مواد خوراکی، روی آوردن ما به تکنولوژی برای کمک به صنعت کشاورزی هیچ جای تعجبی باقی نمیگذراد. براساس اطلاعات فائو، کشور ایران اسلامی عزیزمان در تولید یک سوم از تعداد محصولات اصلی دنیا دارای رتبه های اول تا دهم جهان بوده که سهم محصولات باغی ۱۵ و محصولات زراعی ۷ محصول می باشد. ایران با داشتن ۱۵ محصول باغی مهم دارای مقام جهانی، از نظر تنوع تولید محصولات باغی، بعد از کشورهای چین، امریکا، مشترکاً با ترکیه رتبه سوم دنیا را از آن خود کرده است. با این حال، بخش کشاورزی کشورمان از عدم مکانیزاسیون و استفاده از ادوات کشاورزی و آبیاری نوین رنج می برد و جا دارد در این زمینه کار شود. مناطق شمالی ایران پهناور جزو مهم ترین بخش های کشاورزی در کشور است و نقش بسزایی در تولید محصولات مختلف را دارد و نیاز به مکانیزاسیون زمین های کشاورزی در آن مشهود است، به امید خدا و همیاری مسئولان این مناطق به این مهم دست خواهیم یافت.
استفاده از پهپادها در کشاورزی ( روشی نو در مکانیزاسیون کشاورزی )

امروزه از پهپاد ها استفاده زیادی می شود از تصویر برداری گرفته تا عملیات های نظامی و نجات و … اما اینکه بتوان از پهپاد در کشاورزی هم استفاده کرد بسیار جالب به نظر میرسد. استفاده از روش های نوین همچون پهپاد ها برای افزایش بهره وری مزارع کشاورزی امری اجتناب ناپذیر است، این پهپادها برای مصارفی همچون بررسی میزان سلامت گیاهان، سمپاشی گیاهان و نشانهگذاری دامها وسیله ای بسیار موثر برای کشاورزان محسوب میشود، به عنوان مثال پهپادهای ویژه کشاورزی میتوان وضعیت سلامت محصول و آفات احتمالی را بررسی کرده و پس از نشانهگذاری نقاط آلوده و در معرض خطر، زمین کشاورزی را با استفاده از مخازن تعبیه شده روی پهپاد سمپاشی کنند.
این روش میتواند: تا ۹۵ % کاهش مصرف آب-تا ۳۵% کاهش مصرف سم-قابلیت سم پاشی در تاریکی هوا با بالاترین دقت بدون هم پوشانی-آنالیز اراضی کشاورزی-تهیه نقشه آلودگی مزارع-شناسایی لکه های علف های هرز-اندازه گیری میزان رطوبت گیاه شناسایی دقیق محل لکه ها و آفات و علفهای هرز در مزارع-مکانیزه کردن فرایند سمپاشی از طریق هوا-پاشش یکنواخت و منظم سم-سهولت در انجام فرآیند سم-پاشی و کاهش میزان سم مصرفی-افزایش تولید محصول-کاهش هزینه ها-سم پاشی به صورت یکنواخت-۱۰لیتر محلول در یک هکتار-سم پاشی یک هکتار در ۱۲ دقیقه-عدم ورود ماشین آلات درون مزرعه-تاثیر گذاری حداکثری-سیستم کاملا ضد آب و قابلیت شستسو بعد از عملیات پرواز به صورت روزانه-مجهز به سیستم تشخیص موانع جهت عدم برخورد با عوارض در اراضی کشاورزی-پروازی کاملا اتوماتیک بدون دخالت اپراتور-دارای سه حالت پروازی دستی . نیمه اتوماتیک-فول اتوماتیک-ایمنی بسیار بالا در پرواز و پروازی استیبل در شرایط جوی نامساعد-حفاظت از منابع آبی و کشاورزی-پایش مناطق حفاظت شده با استفاده ها پرنده هدایت پذیر از دور-تهیه عکس نقشه با مختصات جغرافیایی
سمپاشی و کودپاشی مایع مزارع و باغات توسط دو مکانیزم عمده انجام می گیرد :
1- زمینی (مانند سمپاشی انسانی، تراکتور)
2- هوایی (مانند هواپیماهای سبک و هلی کوپتر)
از معایب روش زمینی می توان به موارد زیر اشاره کرد:
تخریب مزرعه و محصول، آسیب شدید و جبران ناپذیر به محیط زیست، آسیب به گونه های مفید جانوری و حتی کشاورزان و خانواده های روستایی ، مصرف بالای آب، هدر رفتگی سم و …
کلام آخر
ما مفتخریم اعلام کنیم که فعالیت های ما تنها محدود به کلاس های علمی و آموزشی نمی باشد .بلکه ما در فونیکس فرصتی را پدید آورده ایم که به کمک آن می توانید در وقت و هزینه خود صرفه جویی کنید و بازدهی را به طور چشمگیر افزایش دهید. زیرا در جامعه امروزی که نیاز ها تغییر کرده اند.
راه حل های قدیمی جوابگوی مشکلات جدید ما نیستند و ما قادر خواهیم بود. با دانش و تخصص خود بهترین راه حل را برای شما به ارمغان آوریم با ارائه ی فعالیتهای صنعتی شرکت فونیکس ساخت و تولید انواع پهپاد و هواپیمای بدون سرنشین خدمات پس از فروش تعمیرات ، آموزش پرسنل و … در خدمت شماست.
همچنین با طراحی دلخواه شما در زمینه های صنعتی و تفریحی به صورت اختصاصی
(طراحی انواع هواپیما ،بالن و …)شما را همراهی می نمائیم.
کاربرد پهپاد ها 1
نقش پهپاد در نظارت بازرسی
مهمتر از همه میکرو پهپادها قابلیت ماموریت در ساختمان ها و محیطهای شهری را فراهم میآورند که آنها را منحصربهفرد میکند. میکرو پهپادها به دلیل کوچک بودن قابلیت انجام ماموریتهایی را دارند که هیچ کدام از وسایل و تجهیزات موجود قابلیت انجام آن را ندارند.

![]()
در عملیات شهری، میکرو پهپادها، در گروههای کوچک وارد عمل میشوند و قادر به انجام عملیات دیدبانی شناسایی و تجسس و تعقیب در سطح شهر و انجام عملیات رله رادیویی هستند . آنها همچنین قادر به مشاهده از پنجرهها هستند و به عنوان حسگر در سطحهای عمودی و مرتفع نیز به کار میروند.ماموریت آنها در داخل ساختمآنها نیز بسیار حائز اهمیت و مورد درخواست نیروهای انتظامیامنیتی است.قابلیت آنها در راهیابی در راهروهای پیچیده، جلوگیری از برخورد کردن به موانع و عملیات رله اطلاعاتی از دیگر کاربردهای میکرو پهپادها است.
نقش پهپادها در نقشه برداری هوایی

![]()
برای ایجاد نقشه های دو یا سه بعدی با روش تصویر برداری هوایی با پهپاد یا همان نقشه برداری هوایی با پهپاد، دوربین بر روی هواپیمای بدون سرنشین نصب می شود. معمولاً ثابت کننده دوربین آن را با محور عمودی به سمت زمین نگاه می دارد. با استفاده از فتوگرامتری هوایی می توان مدل های سه بعدی، تصاویر قائم سازی شده (ارتوفتو)، ابر رنگی نقاط تولید کرد. از این محصولات می توان نقشه های توپوگرافی، نقشه های پارسل شهری، کاداستر و سایر نقشه های موضوعی را تولید یا استخراج نمود.
پهپاد نقشه برداری، هواپیمایی است که قابلیت هدایت از دور را دارد و برای انجام امور مختلف نقشه برداری استفاده میشود. پهپاد نقشه برداری نوعی سنجنده محسوب می شود که مجهز به دوربین تصویربرداری، سنجنده ی مادون قرمز و لیدار می باشد. استفاده از پهپاد نقشه برداری، علاوه بر دقت و سرعت بالا، قابلیت عبور در مناطق خطرناک و صعب العبور را در هر بازه زمانی فراهم میکند. استفاده از پهپاد نقشه برداری، کاربرد دوربین غیرمتریک به جای دوربین متریک را سبب میشود و بسته به تجهیزات پهپادهای نقشه برداری، رنج قیمتی متفاوتی برای آنها (کمتر از یک میلیون و به مراتب بیشتر از آن) در نظر گرفته شده است که از طریق وب سایت های متعدد قابل دستیابی میباشند. تصویر برداری های هوایی زیادی با استفاده از پهپاد نقشه برداری در کشور انجام شده است که دال بر استفاده از پهپاد نقشه برداری در ایران می باشد.

![]()
دلایل متعددی وجود دارد که چرا نقشه برداران زمینی به طور فزاینده ای پرنده های بدون سرنشین را به تجهیزات خود اضافه می کنند. پروژه های بزرگ که زمان زیادی برای نقشه برداری زمینی می برند، اغلب می توانند در کمترین زمان و با همان کیفیت با عرضه محصولات جانبی بیشتر، نقشه برداری شوند. تکنولوژی UAV همچنین برای سایت هایی که دسترسی دشواری دارند یا مکان هایی مانند معادن، دامنه های ناپایدار که برای ارسال نیروی زمینی بسیار خطرناک می باشند، ایده آل است. با این حال این روش نیز چالش های خاص خود را دارد.
ما به عنوان متخصصان نقشه برداری هوایی مجهز به تجهیزات کاملا حرفه ای از قبیل پرنده های عمود پرواز (کوادکوپتر، اکتاکوپتر) و هواپیمای فیکس وینگ قادریم مناطق بزرگی از زمین را در مدت زمان مناسب و با هزینه بسیار ایده آل، با جزئیات بیشتر نسبت به روش های نقشه برداری زمینی، در مقیاس بزرگ به نقشه درآوریم.
یکی از روشهای نقشه برداری تصویر برداری هوایی است. امروزه از پهپادها برای تصویر برداری هوایی استفاده میشه که در تصاویر زیر نمونههایی از تصویر برداری هوایی دیده میشود.تصویربرداری هوایی یکی قدیمی ترین روش های فیلمبرداری در جهان است. از زمانی این نوع فیلمبرداری را با بالن انجام میدادند روزگارانی سپری شد تا از کایت و هواپیما و هلیکوپتر امروزه به پرنده های هدایت پذیر از دور (پهپاد) تبدیل شده است. تصویربرداری هوایی را ابتدا هلی شات می نامیدند چرا که غالبا با هلیکوپتر فیلمبرداری میشد. این روزها حتی کودکان هم پرنده هایی دارند که جایگزین آدم آهنی و ماشین کنترلی های سابق برای آنها شده است. این پرنده ها بسته به امکانات و قابلیت هایی که دارند قیمت های متفاوتی دارند و به همین نسبت هدایت آنها نیز پیچیده تر میشود. به نحوی که پهپاد هایی که با آنها تصویربرداری هوایی انجام میشود ممکن است نیاز به یک خلبان ماهر داشته باشد. چراکه بسیار مهم است که یک پرنده ۲۰۰ میلیون تومانی سالم به آشیانه بازگردد.

![]()
تصویر برداری هوایی در مدیریت یک منطقه دید کامل پیدا کردن نسبت به یک منطقه بسیار کمک کننده است. تصویر برداری هوایی گاها برای اهداف نظامی هم مورد استفاده قرار میگیره. این تصاویر نحوه چیدمان دشمن و تجهیزات اونها رو نشون میده. البته کاربرد این گونه پرندهها بسیار وسیع است و از موارد تفریحی گرفته تا جستجو برای نجات آسیب دیدگان کاربرد دارند.

![]()
نقش پهپاد در بازرسی صنایع نفت و گاز
کاربرد دیگر پهپادها را می توان در اجرا و مدیریت پروژه های بزرگ صنعتی و عمرانی جستجو کرد. جایی که از این ابزار برای انجام بازرسی های دوره ای و تخصصی تاسیساتی همچون سکوهای نفتی، لوله های انتقال آب و گاز، پروژه های عمرانی بزرگ همچون پل ها و سدها و مواردی از این دست بهره گرفته می شود.
ایمنی و بهره وری برای تأسیسات پالایش انرژی مدرن مهم است و بازرسی ها ماموریت حیاتی برای حفظ عملیات هستند. روش های بازرسی سنتی همواره مشکلات و سختی های فراوانی داشته اند. با استفاده از پهپادها و ربات های پرنده می توان عملیات نظارت، بازرسی، نشت یابی و امنیت تاسیسات و خطوط انتقال نفت، گاز و پتروشیمی را بادقت بسیار بالا در مدت زمان کم و با هزینه های منطقی انجام داد. مرکز پهپادها آماده ارائه کلیه خدمات عملیات های بازرسی، نظارت و امنیت خطوط و صنایع نفت، گاز و پتروشیمی می باشد.
با تجهیز پهپادها به دوربین ها و سنسورهای مناسب می شود موارد خطرناک همچون نشتی ها، بخش های تحت فشار، حرارت بیش از حد و . . . را شناسایی نمود. حتی اتصال بازوهای رباتیک، این پرنده های کنترل شونده را به ربات های تکنیسین بدل خواهد کرد. بدین سان می توان برخی تعمیرات در نقاط غیر قابل دسترس را به راحتی به انجام رساند.

![]()
با توجه به سابقه وجود خطوط لوله نفت وگاز در کشور، نیاز به نظارت دقیق به منظور تضمین تداوم جریان نفت وگاز درکشور احساس میشود. از سوی دیگر با توجه به اتمام عمر طراحی خطوط لوله قدیمی و بروز پدیده خوردگی و نشتی، نیاز به استفاده از روشهای سریع و کم هزینه برای نظارت بر انتقال فرآورده های نفتی توسط خطوط لوله ضروری است. این مهم نشان میدهد که پرنده های هدایت پذیر از دور (پهپاد)، نسبت به روشهای دیگر بازرسی خطوط لوله در ایران دارای برتری هستند. پهپادها با توجه به انعطاف پذیری و قابلیت حمل حسگرهای متنوع میتوانند پاسخگوی نیازهای عملیاتی خطوط لوله در ایران باشند.
نقش پهپاد در بازرسی خطوط انتقال برق
پهپادها نسبت به نیروی انسانی عموما سریعتر و کم هزینهتر هستند و میتوانند به مکانهایی بروند که ممکن است برای کارکنان ایمن نباشد. با کاهش هزینهها و افزایش قابلیتها، پهپادها نشت خطوط لوله گاز طبیعی را شناسایی کرده، به بازرسی خطوط انتقال و توزیع نیروگاههای برق و ارزیابی نیروگاههای حرارتی کمک میکنند.
اگرچه عواملی مانند محدودیت عمر باتری و سیستمهایی که به آنها در جلوگیری از برخورد با موانع هنگام پرواز کمک میکنند باعث محدودیت فعالیت پهپادها میشود اما محققان در تلاش برای مفیدتر کردن آنها هستند.

![]()
نیروگاههای برق میتوانند از پهپادها برای بازرسی خطوط انتقال و توزیع برق استفاده کنند.بازرسی خطوط انتقال برق غالبا توسط وسایل نقلیه هوایی باسرنشین و یا از طریق بازدید میدانی نیروهای انسانی انجام می شود. این گونه روش های بازرسی، نگهداری و تعمیر خطوط برق، کم بازده وپرهزینه محسوب می شوند و همراه با خطراتی برای نیروهای انسانی هستند. این تجهیزات توانایی پرواز درمناطق مختلف جغرافیایی و شهری را دارند، به گونه ای که می توانند از طریق پرواز در نزدیکی خطوط برق، داده های گوناگونی را جمع آوری نمایند. برای یک سیستم خودکار نظارت بر خطوط برق، شناسایی وجداسازی خطوط انتقال از تصاویر پس زمینه امری مهم و چالش برانگیز است. از سویی دیگر، پردازشتصاویر تهیه شده بوسیله دوربین های موجود بر روی پهپاد امری حیاتی جهت ناوبری است. در انتهای این مقاله به کاربردهای دیگر پرنده های بدون سرنشین در صنعت برق اشاره می شود. از طریق پردازش وذخیره سازی مسیر پروازی یک کوادراتور در طی عملیات نظارت و بازرسی، می توان داده های مورد نیازجهت ثبت موقعیت جغرافیایی خطوط برق و سایر تجهیزات وابسته را جمع آوری و در تکمیل اطلاعات استفاده نمود.
نقش پهپاد ها در نظارت و ارزیابی معادن
پروژه معدنی، عملیاتی پیچیده است. اکتشاف، استخراج، فرآوری و فروش مواد معدنی، چند بخش پویا در این صنعت بزرگ مقیاس هستند. این وسعت و بزرگی می تواند با مشکلات عدیده ای نیز در سایت پروژه روبرو شود. خوشبختانه با پیشرفت تکنولوژی و استفاده از نقشه برداری به کمک پهپاد و با یک مدیریت صحیح، همه افراد درگیر در پروژه می توانند فعالیت های مربوطه را از راهی امن، سودآور، کارآمدتر و آگاهانه انجام دهند. پهپادها توانسته اند خود را در صنعت معدنکاری به عنوان جایگزینی کارآمد برای روش های مبتنی بر نظارت زمینی ثابت کنند. در پست های قبلی در مورد کاربرد پهپاد ها در اکتشاف ها صحبت شد، اما تکنولوژی پهپاد فراتر از نقشه برداری است، عکس های هوایی و ویدئوهای تهیه شده براین اساس می توانند به منظور طیف وسیعی از کاربردها مورد استفاده قرار گیرند. در این یادداشت در مورد کاربردهای پهپاد در صنعت معدنکاری بیشتر صحبت می شود:
- ایمنی
بدیهی است که معدنکاری فعالیتی خطرناک است. متاسفانه دسترسی به موقعیت منابع معدنی با موانع و مشکلاتی همراه است، معمولا معادن در نقاط دورافتاده و صعب العبور قرار دارند و خصوصا در مراحل اولیه فعالیت معدنکاری و اکتشاف دسترسی به این مناطق بسیار دشوار است. اما با استفاده از پهپاد تا حد زیادی می توان از مخاطرات این مرحله دوری کرد.
به عنوان نمونه، در مرحله اکتشاف می توان نقشه برداری و برداشت تصاویر با کیفیت را با استفاده از پهپاد انجام داد و تیم فنی را از خطرات احتمالی دور نگاه داشت. با استفاده از این فن آوری در صنعت معدنکاری می توان از راه دور شناخت خوبی از موقعیت فعالیت، اجرای و گسترش پروژه بدون نیاز به روبرو شدن با مخاطراتی نظیر زمین لغزش بدست آورد. همچنین اگر شرایط اضطراری یا مسائل دیگر در طول پروژه بوجود آیند، می توان با استفاده از پهپاد به این مناطق دسترسی داشت. به این طریق می توان بدون نیاز به حضور در محیط خطر، با داشتن اطلاعات کافی از شرایط، بهترین و سریعترین تصمیم را اتخاذ نمود.

- حفاری و انفجار
تقریبا حدود یک سوم از هزینه های استخراج به منظور عملیات حفاری و آتشباری صرف می شود. با استفاده از پهپاد می توان این بخش از عملیات معدنکاری را تا حد زیادی بهینه سازی کرد. اطلاعات بدست آمده از تصاویر برداشت شده با استفاده از پهپاد این امکان را فراهم می سازد که پارامترهای مختلف پله های معدن را قبل از انجام عملیات حفاری و آتش باری مورد ارزیابی قرار داد. ایجاد توازن و تعادل بین مقدار مواد منفجر و سنگ در زمان انفجار کار ساده ای نیست. با کمک گرفتن از تصاویر دقیق و نقشه های برداشت شد با استفاده از پهپاد، امکان تعیین نسبت بهینه مواد ناریه به سنگ فراهم می شود.
قبل از انجام انفجار، با استفاده از تصاویر موقعیت دار برداشت شده توسط پهپاد، این امکان برای مهندسین معدن و آتشباری فراهم می شود که از حفر چال ها در موقعیت های از پیش طراحی شده اطمینان خاطر کسب کنند. تصاویر و ویدئوهای برداشت شده پس از اجرای عملیات انفجار، تحلیل خرد شدگی سنگ را تسهیل می کند.
- مدیریت دامپ های باطله و ماده معدنی
تعیین موقعیت، طراحی، پیاده سازی و در ادامه مدیریت دامپ های باطله و ماده معدنی یکی از مراحل دشوار عملیات معدنکاری است. تا قبل استفاده از پهپادها، بخش های مختلف این عملیات با کمک تیم نقشه برداری زمینی انجام میشد که خطرات و حوادث زیادی را در بر داشت. از طرف دیگر، در نقشه برداری با پهپاد ، نیازی به حضور نقشه بردار در محل دپوها نیست و این مهم باعث می شود که ضمن انجام نقشه برداری دپوها و محاسبه احجام، عملیات معدنکاری بدون وقفه ادامه یابد. با استفاده از تکنولوژی پهپاد، عملیات نقشه برداری و دپومتری می تواند به صورت یه برنامه زمان بندی شده منظم انجام شود و با این روش امکان بروزرسانی دقیق اطلاعات مربوط به احجام برای تیم عملیاتی و مدیریتی میسر می شود.

- بارگیری و حمل و نقل
با استفاده از تکنولوژی پهپاد و محاسبه و بررسی پارامترهایی نظیر اندازه گیری احجام استخراجی، نظارت بر ارتفاع پله ها و همچنین تولید مدل های دیجیتالی شبکه راه های معدن، می توان روند بارگیری و حمل و نقل در معدن را اصلاح و بهینه کرد.
- بررسی های زیست محیطی
با انجام برداشت های منظم و در اختیار داشتن داده های هوایی بدست آمده از این برداشت ها، می توان با اطمینان خاطر از رعایت مقررات زیست محیطی، عملیات معدنکاری را ادامه داد. با استفاده از تکنولوژی پهپاد به راحتی می توان کاربری بخش های مختلف محدوده معدنی و مناطق پیرامونی را به صورت مستمر مورد ارزیابی و نظارت قرار داد و هرگونه تخلف و یا تعدی به حریم دارایی های معدن و یا بروز مشکلات زیست محیطی را سریعا شناسایی کرد.
- نظارت و پایش به هنگام تجهیزات و دارایی ها
به منظور حفظ کیفیت در بالاترین سطح، داشتن درک و شناخت صحیح از دارایی ها می تواند به عنوان یک چالش مطرح باشد. با کمک گرفتن از فن آوری پهپاد، بجز پایش بهنگام تجهیزات و دپوها، می توان از وضعیت عملیات استخراج معدن نیز اطلاعات و دانش خوبی کسب کرد. به عبارت دیگر، می توان چندین فرآیند متفاوت را به سادگی انجام داد.
بجز اینکه اطلاعات ذخیره شده از این طریق بسیار دقیق است، با انجام پروازهای روزانه و مکرر می توان اطلاعات بروز تمامی بخش ها و زوایای سایت را به منظور تجزیه و تحلیل سیستم در اختیار داشت.
با توجه به استفاده از چندین پیمانکار فرعی در پروژه های معدنی، مدیریت زمان و منابع بین آنها بسیار مهم است. با استفاده از داده های پهپادی می توان به بهترین نحو در مورد تخصیص زمان مناسب برای انجام فعالیت های هر کدام از پیمانکاران فرعی تصمیم گیری کرد. با توجه به ویژگی های پروژه های معدنی، تاخیر در عملکرد هر یک از این پیمانکاران می تواند بر عملکرد باقی پیمانکاران و در نهایت پیشرفت کلی پروژه تاثیرگذار باشد. با استفاده از پهپاد، این فرآیند راحت تر و بهتر قابل مدیریت است، که در نهایت منجر به افزایش بهره وری خواهد شد.
تا قبل از استفاده از تکنولوژی پهپاد، عملیات نظارت بر بخش های مختلف معدن همچون کارگاه استخراج، سد باطله، دپو ماده معدنی، دپو باطله، نوار نقاله، جاده های دسترسی و غیره، همواره با حضور نیروی کارشناسی در موقعیت مورد نظر انجام می شد که بعضا با خطراتی نیز همراه بود. با استفاده از تصاویر و ویدئوهای برداشت شده به کمک پهپاد، امکان انجام بازرسی های مستمر با هزینه کمتر و ایمنی بالاتر فراهم شده است.

- بهره وری
افزایش کارایی و راندمان یکی دیگر از مزایای استفاده از پهپادها در صنعت معدن است. انجام یک کار و فعالیت یک چیز است، اما انجام همان کار و فعالیت با بهره وری و راندمان بالا موضوع دیگریست. مقدار معمول کاری که در یک دوره زمانی مشخص انجام میشود، با استفاده از فن آوری پهپاد می تواند با سرعت بیشتری انجام شود. با استفاده از داده های بدست آمده از پهپاد، اگر در بخشی از پروژه ناکارآمدی به وجود آید، قبل از اینکه این مشکل تسری پیدا کرده و کیفیت کار و زمان اتمام آن بخش از پروژه را مورد تهدید قرار دهد، قابل رصد و شناسایی خواهد بود. این ویژگی امکان مدیریت بهتر بر پروژه را فراهم می کند.
- سودآوری و بازگشت سرمایه
اطمینان از بازگشت سرمایه یکی از مهمترین پارامترهای هر پروژه معدنی است. استفاده از پهپاد می تواند با کنترل مولفه های زیر ما را در این راه یاری نماید:
- درک ارزش
به منظور برنامه ریزی دقیقتر و ترسیم چشم انداز درست از پروژه، شناخت صحیح از ارزش و ویژگی های محصول خروجی معدن امری ضروری برای مدیران شرکت است. فرض کنید در یک پروژه معدنی با هدف استخراج طلا، پس از اتمام پروژه تنهای نیمی از آنچه که به عنوان سودآوری انتظار میرفت محقق شده است. متوقف کردن پروژه در مراحل اولیه و قبول ضررهای حداقلی در پروژه، بهتر از آن است که پروژه را با ضرر تا انتها ادامه دهیم. با این نگاه، می توان برنامه ریزی و پیش بینی عملیاتی بهتری را برای پروژه انجام داد، که در نهایت در مدیریت برنامه های آتی عملیات معدنکاری مفید به فایده خواهد بود.
افزایش اعتبار و برند شرکت همواره می بایست به عنوان اولویت اصلی مورد نظر باشد. پیش بینی دقیق از مقدار منابع امری غیرممکن است، اما با استفاده فن آوری پهپاد و نقشه برداری دقیق، می توان شناخت و آگاهی خوبی از کارگاه های استخراج و دپوهای ماده معدنی داشت تا از ایجاد تعهد فروش غیرقابل تحقق محصولات و به خطر افتادن اعتبار شرکت جلوگیری کرد.

به عنوان جمع بندی می توان گفت، اگر شما در یک محیط امن، با ملاحظه و کارآمد کار نکنید، منافع و سود پروژه هیچ گاه به بالاترین پتانسیل برآورد شده نخواهد رسید. کمک گرفتن از فن آوری پهپاد در تهیه نقشه ها و تصاویر بسیار دقیق، و استفاده از این اطلاعات، شما را قادر می سازد تا پروژه های معدنی فعلی و آتی را با حداکثر سودآوری به انجام رسانید.
#فونیکس_رویاهات_باش #آشیانه_ ققنوس_ ایرانیان#فونیکس #علیرضا_ نوروزی #خانواده_ فونیکس
مولتی روتور و انواع آن
مولتی روتور
– مولتی روتور و عمود پرواز چیست :
دستگاهی است شبیه به هلیکوپتر که توسط چرخش ملخ یا چرخ بال نیروی برا یا همان لیفت را تولید میکند که باعث به پرواز در آمدن مجموعه مولتی روتور می گردد، پرواز آن پایداری بسیار بیشتری نسبت به هلیکوپتر دارد، از این رو پرواز با این پرنده ها بسیار راحت تر از هلیکوپتر می باشد، معمولا در یک مولتی روتور از ۳ موتور به بالا استفاده می کنند و نحوه چیدمان موتورها به گونه ای طراحی شده است تا بیشترین تعادل توسط ایجاد نیروی موتورها ایجاد شود در طراحی فریم یا بدنه دستگاه اکثرا از یک دایره فرضی استفاده نموده و با توجه به زوایای داخلی یک دایره که ۳۶۰ درجه است، موتورها چیده شوند، به طور مثال در یک تترا کوپتر موتورها با زاویه ۱۲۰ درجه نسبت به هم بسته می شوند و در یک کواد کوپتر زاویه فاصله موتور ها ۹۰ درجه می باشد.
مولتی روتورها، جزو پرنده هایی هستند که هم به عنوان سرگرمی و هم به عنوان حرفه ای کاربرد گسترده ای دارند، این نوع از پرنده ها به دلیل اینکه فضای خاصی برای تیکاف و لندینگ (بخواستن و نشستن) نیاز ندارند در هر فضا و مکانی قابل پرواز کردن می باشند، امروزه با اضافه شدن دوربین های با کیفیت و سیستمهای ارسال و دریافت تصویر، این نوع از پرنده ها مورد توجه بسیار زیاد جوانان و علاقه مندان به این ورززش مفرح قرار گرفته اند، به راحتی در هر جایی که هستین پرنده خود را به پرواز در بیاورید و با ثبت تصاویر زیبا و به یاد ماندنی از این تکنولوژی لذت ببرید.
مولتی روتور آماتور و مولتی روتور حرفه ای :
مولتی روتورها به دو دسته آماتور و حرفه ای تقسیم بندی می شوند، که طبیعتا دستگاه های حرفه ای دارای قیمتهای بالاتری هستند، قیمت نهایی یک دستگاه مولتی روتور را فلایت کنترل و کیفیت موتور های آن مشخص می کند، فلایت کنترل یا همان سیستم کنترل پرواز دارای نقش اساسی در پرواز مولتی روتورها می باشد، در سیستمهای آماتور که معمولا به صورت فول پک ارائه می شوند، فلایت کنترل، جایرو و اسپید کنترل ها به صورت آن برد قرار دارند و در نتیجه قیمت تمام شده یک محصول فول پک آماتور بسیار کمتر از یک دستگاه حرفه ای می باشد، لذا با توجه به نیاز خود باید برای مولتی روتور انتخابی خود هزینه کنید.
مولتی روتور و انواع آن :
مولتی روتورها دارای انواع مختلفی می باشند که بر اساس تعداد موتورهای آنها نام گذاری میگردند که به ترتیب عبارتند از:
سینگل کوپتر یا تک موتوره :

![]()
سینگل کوپتر بسیار شبیه به هلیکوپتر است با این تفاوت که در این نوع از کوپتر از ۱ موتور جهت ایجاد نیروی لیفت و پرواز استفاده شده است ، البته سینگل کوپتر را قاعدتا نباید جزو مولتی روتورها حساب کنیم چون لفظ مولتی روتور به معنای تعداد دو یا بیشتر از دو موتور است ولی برای کامل شدن مجموعه مولتی روتورها در بعضی موارد آن را جزو این گروه حساب می کنند. کنترل سینگل کوپتر با استفاده از تیغه های کناری است که توسط سروو موتور جهت حرکت تیغه های آن تغییر کرده و. سبب پرواز به طرفین می گردد ، سینگل کوپترها کمتر مورد توجه قرار گرفته اند ، زیرا این پرنده ها عملا در صنعت کاربرد چندانی نخواهند داشت ، و در حال حاضر نمونه های آزمایشگاهی آن تولید و ساخته می شود ، ولی با توجه به آینده بسیار روشن مولتی روتورها بعید نیست که شاهد پیشرفت سینگل کوپترها در آینده ای نه چندان دور باشیم.
دوال کوپتر یا مولتی روتور ۲ موتوره :

![]()
دوال به معنای دو می باشد. در ساختمان دوال کوپترها از ۲ موتور استفاده می گردد به همین دلیل به آن دوال کوپتر می گویند ، همچنین این پرنده را بی کوپتر نیز می نامند. این پرنده دارای دو موتور می باشد که به شکل های مختلف و با استفاده از سرووها حرکات مختلف آنها به اجرا در می آید ، و جهات حرکتی به سمت جلو و عقب و راست و چپ توسط پیشرانش موتورها و با کمک تیغه های حرکتی که از طریق سروو جا به جا می شوند به حرکت مجموعه کمک می نمایند.
تری کوپتر یا مولتی روتور ۳ موتوره :

![]()
تری به معنای سه می باشد. در ساختار این مولتی روتور از سه عدد موتور استفاده می گردد ، تری کوپترها پرنده های سرعتی هستند و بیشتر برای مسابقات از آنها استفاده می گردد از نظر استیبل بودن به دلیل استفاده از ۳ موتور میتوان گفت به آسانی نمیتوان به آناه اعتماد کرد ، از همین رو برای ایجاد سرعت و هیجان از آنها استفاده می شود، اگر یک دایره را به صورت فرضی در نظر بگیریم که زاویه داخلی آن ۳۶۰ درجه باشد ، این زاویه محیطی را بر ۳ تقسیم می نمایند که هر موتور با زاویه ۱۲۰ درجه نسبت به هم نصب مینمایند ، و ساختار یک تری کوپتر شکل می گیرد.
کواد کوپتر یا مولتی روتور ۴ موتوره :

![]()
کواد به معنی چهار می باشد ، کواد کوپتر نوعی از مولتی روتور از که از ۴ عدد موتور در ساختار آن استفاده شده است ، کواد کوپتر متداول ترین نوع از مولتی روتور است ، استیبل بودن بسیار بالا و پایداری بسیار عالی در هنگام پرواز و از طرفی اصطحلاک کم و کم مصرف بودن آنها باعث شده تا اکثر شرکتهای تولید کننده مولتی روتور به سمت طراحی و ساخت کواد کوپتر سوق پیدا کنند ، ساخت کواد کوپتر بسیار آسان تر از بقیه موارد است و از محبوبیت خاصی برخوردار است. به این پرنده کوادروتور هم میگویند. کوادروتور در دسته روتور کرافت ها (rotorcraft) می باشد که نقطه مقابل fixed-wing aircraft یا هواپیماهای بال ثابت می باشد.
![]()
کواد کوپتر ها به دو ساختار + و ساختار X اسمبل می گردند و هر دو حالت اسمبل متداول هستند ، بطور کلی در کوادروتور ها ساختار X به دلیل دید و ایجاد پایداری بیشتر متداول تر است ، در مواردی هم به دلیل ساختار + به ساختار یک هواپیما شباهت دارد که جلوی آن با یک مشخص است و موتور های سمت چپ و راست مشابه بال های هواپیما هستند و موتور عقب مشابه دم هواپیما ست و باعث هدایت راحتر آن در آسمان است که باعث شده است این نوع کوادروتور طرفداران خاص خودش را داشته باشد.
مولتی روتور یا کواد کوپتر با حالت Y4 copter :

![]()
نوع دیگر از ساختار کواد کوپتر مدل Y4 می باشد که ساختاری مشابه تری کوپتر دارد ولی به جای سروو دم یک عدد موتور قرار گرفته است و در انتهای دم دو عدد موتور به صورت هم محور قرار دارند. و به صورت معکوس بر روی هم بسته می شوند. این مدل از کواد کوپتر برای سرعت هم استفاده می گردد ، به طور کلی میتوان از آرایشهای مختلفی برای اسمبل یک مولتی روتور و کوادروتور استفاده نمود.
پنتا کوپتر یا مولتی روتور ۵ موتوره :

![]()
این نوع از مولتی روتور از ۵ عدد موتور جهت ایجاد نیروی لیفت و پرواز استفاده می کند ، این نوع از مولتی روتور نوعی متداول است ولی به دلیل حفظ پایداری بهتر میتوانید از آن استفاده کنید ، از این نوع مولتی روتور برای تصویر برداری و کارهایی مانند سم پاشی مزارع استفاده می گردد. پنتاکوپتر به دلیل جاگذاری مناسب موتورها مناسب فیلمبرداری و عکسبرداری می باشد.
هگزا کوپتر یا مولتی روتور ۶ موتوره :
بعد از کواد کوپتر متداول ترین مولتی روتور هگزا کوپتر یا هگزاروتور است ، این نوع از مولتی روتور از ۶ عدد موتور جهت پرواز استفاده می کند ، یکی از دلایلی که باعث شده تا هگزا کوپتر بسیار مورد اهمیت قرار گیرد استیبل بودن و پایداری بسیار عالی آن می باشد ، از هگزا کوپترها جهت مصارفی مانند تصویر برداری هوایی ، نقشه برداری ، عملیات اکتشاف صنعتی و مواردی که نیاز به پایداری و قدرت در پرواز است استفاده می گردد ، هگزا کوپترها را میتوان با ساختاری مشابه شکل زیر اسمبل کرد
نیروی محرکه به مراتب بیشتر در مقایسه با کوادکوپتر
عملکرد مطلوب در حضور باد و شرایط جوی نامساعد
ثبات قابل قبول در طول پرواز
موتور های اضافی
قیمت بیشتر و نگهداری دشوار تر در مقایسه با کوادکوپتر
کمی بزرگتر و سنگین تر نسبت به کوادکوپتر و در نتیجه حمل و جابجایی دشوار تر
مدت زمان پروازی کمتر

![]()
همچنین نوعی از هگزا کوپتر هست که به صورت Y اسمبل می گردد ، از این نوع هگزاکوپتر در مصارفی همانند شرکت در مسابقات سرعتی استفاده می گردد.

![]()
اوکتا کوپتر یا مولتی روتور ۸ موتوره :

![]()
اوکتاکوپتر به عنوان پهپادی پیشرفته تر از دو مورد قبلی شناخته می شود و برای حمل و نقل تجهیزات حرفه ای بسیار مناسب می باشد.
بنابراین کسانی که قصد دارند تجهیزات گران قیمت روی پهباد نصب کنند و به ایمنی کامل نیاز دارند، می توانند روی اوکتاکوپتر ها حساب ویژه ای باز کنند.
خوشبختانه اوکتاکوپتر ها از ویژگی موتور های اضافی بهره مند هستند و در طول پرواز عملکرد مطلوبی دارند. این نوع مولتی روتور ها دارای هشت عدد موتور هستند و بازو های آن ها در مقایسه با سایر مدل ها بلند تر است تا حتی در حضور باد های شدید نیز بتوانند ثبات خود را حفظ کنند.
همین ویژگی ها باعث می شود بسیاری از کاربران اوکتاکوپتر ها را به عنوان یک پلتفرم فوق العاده ایده آل برای تصویر برداری هوایی معرفی کنند. در مقابل این نوع مولتی روتور ها معمولا با قیمت بالا به فروش می رسند و حمل و نقل آن ها نیز کار چندان ساده ای نیست.
نیروی محرکه فوق العاده بالا و مناسب حمل و نقل تجهیزات سنگین
موتور های اضافی
عملکرد مطلوب در حضور باد های شدید
ثبات پروازی عالی
قیمت بیشتر در مقایسه با کوادکوپتر و هگزاکوپتر
بدنه بزرگتر و سنگین تر
جابجایی و حمل پر دردسر
مدت زمان پروازی کمتر (به دلیل موتور های بیشتر و مصرف انرژی بالا)
اوکتا کوپتر یا مولتی روتور ۸ موتوره :

![]()
در اکتاکوپتر معمولا از چهار نوع طرح برای نصب موتورها استفاده می شود. آرایش زیر همه آنها را به صورت یکجا نشان می دهد. دقت کنید که در شرکت های مختلف نامگذاری های متفاوتی صورت می گیرد که ما برای آشنایی شما با این نامگذاری ها آنها را به صورت زیر هم در یک شکل نشان داده ایم. آرایشهای ۳ و ۶ یکسانند و آرایشهای ۲ و ۵ نیز یکسانند و نمایانگر نوع I8 یا همان + می باشد. آرایش شماره ۱ هم نوع X یا همان X8 را نشان می دهد. ارایش شماره ۴ نیز نوع V یا همان V8 را نشان می دهد.
دقت داشته باشید که در آرایش شماره ۵ از نوع V موتور ها لزوما در یک مسیر مشخص نیستند و می توانند به صورت دو خط موازی نیز نصب شوند که به صورت مستطیل شکل می شود. اگر می خواستیم این نوع آرایش موتورها هم جزو موارد بالا قرار دهیم ۵ نوع می شد.
همچنین چینش و چرخش موتورهای نوع X8 به صورت زیر است. گویی دو کوادروتور که بر روی هم سوار شده اند!

![]()
همانطور که توضیح داده شد امروزه مولتی روتورها در حالتهای مختلفی طراحی و ساخته می شوند و برای مصارف گوناگون مورد استفاده قرار میگیرند، در واقع کاربرد مولتی روتورها در تمامی زمینه ها به زودی فراگیر خواهد شد ، مولتی روتور یا ربات پرنده نسل جدیدی از رباتها می باشد که معرفی شده اند تا زندگی انسانها آسان تر شوند، این نوع از رباتها با تلفیقی از کامپیوتر و علوم مختلف مکانیک میتوانند یک یاور تمام عیار برای انسان باشند، شاید در آینده ای نه چندان دور شاهد ابعاد بسیار وسیع تر استفاده از مولتی روتور در زندگی روزمره خود باشیم، در هر صورت این شاخه از رباتیک بسیار جای پیشرفت دارد و روز به روز به علاقه مندان این رشته اضافه خواهد شد.
#فونیکس_رویاهات_باش #آشیانه_ ققنوس_ ایرانیان#فونیکس #علیرضا_ نوروزی #خانواده_ فونیکس